
State-based transformations with brainstate#
![]()

Welcome! This tutorial introduces state-based transformations in brainstate, powerful tools that enable efficient simulation and compilation of brain models. You’ll learn:
How to use
for_loopfor sequential time-step simulationsWhen and how to apply
jit(Just-In-Time compilation) for performanceUsing
vmapfor vectorization across multiple trials or batchesUsing
condfor conditional branching in JIT-compiled codeUsing
gradfor automatic differentiation and optimizationCombining transformations for complex simulation workflows
Best practices and common patterns
Prerequisites:
Basic Python knowledge
Familiarity with
brainstate.nn.Dynamics(see the LIF neuron tutorial)Understanding of neural dynamics concepts helps but is not required
Setup and Imports#
import braintools
import brainstate
import brainunit as u
import jax
import jax.numpy as jnp
import numpy as np
import matplotlib.pyplot as plt
# Set global simulation time step
brainstate.environ.set(dt=0.1 * u.ms)
What are Transformations?#
In brainstate, transformations are function decorators and utilities that modify how your neural dynamics code executes:
for_loop: Sequentially iterates over time steps or data, managing state updates automaticallyjit: Just-In-Time compiles your functions for faster execution on CPU/GPU/TPUvmap: Vectorizes (batches) computations across multiple trials or parameter setsmap: Memory-efficient batching when fullvmapwould exceed memorycond: Enables conditional branching in JIT-compiled code for event-driven dynamicsgrad: Computes gradients automatically for optimization and learning
These transformations handle the complex bookkeeping of stateful computations, allowing you to write simple, readable code while achieving high performance.
Example Model: Simple LIF Neuron#
Let’s define a simple LIF neuron model that we’ll use throughout this tutorial.
from typing import Callable
class LIFDynamics(brainstate.nn.Dynamics):
"""
A leaky integrate-and-fire neuron implemented as a Dynamics module.
This implementation matches the working example from brainstate_LIF_neuron.ipynb.
"""
def __init__(
self,
in_size: brainstate.typing.Size,
R: brainstate.typing.ArrayLike = 1.0 * u.ohm,
tau: brainstate.typing.ArrayLike = 5.0 * u.ms,
V_th: brainstate.typing.ArrayLike = 1.0 * u.mV,
V_reset: brainstate.typing.ArrayLike = 0.0 * u.mV,
V_rest: brainstate.typing.ArrayLike = 0.0 * u.mV,
V_initializer: Callable = braintools.init.Constant(0.0 * u.mV),
spk_fun: Callable = braintools.surrogate.ReluGrad(),
spk_reset: str = "soft",
name: str | None = None,
):
super().__init__(in_size, name=name)
# Parameters (unit-aware)
self.R = braintools.init.param(R, self.varshape)
self.tau = braintools.init.param(tau, self.varshape)
self.V_th = braintools.init.param(V_th, self.varshape)
self.V_reset = braintools.init.param(V_reset, self.varshape)
self.V_rest = braintools.init.param(V_rest, self.varshape)
self.V_initializer = V_initializer
# Spiking
self.spk_fun = spk_fun
self.spk_reset = spk_reset
def init_state(self, batch_size: int | None = None, **kwargs):
self.V = brainstate.HiddenState(
braintools.init.param(self.V_initializer, self.varshape, batch_size)
)
def reset_state(self, batch_size: int | None = None, **kwargs):
self.V.value = braintools.init.param(self.V_initializer, self.varshape, batch_size)
def get_spike(self, V=None):
V = self.V.value if V is None else V
v_scaled = (V - self.V_th) / (self.V_th - self.V_reset)
return self.spk_fun(v_scaled)
def update(self, x=0.0 * u.mA):
last_v = self.V.value
spk = self.get_spike(last_v)
# Reset policy
V_th_or_v = self.V_th if self.spk_reset == 'soft' else jax.lax.stop_gradient(last_v)
V = last_v - (V_th_or_v - self.V_reset) * spk
# Dynamics integration by exponential Euler
dv = lambda v: (-(v - self.V_rest) + self.R * x) / self.tau
V = brainstate.nn.exp_euler_step(dv, V)
self.V.value = V
return self.get_spike(V)
# Helper function to run simulations
def run_lif(lif_module, inputs, reset=True):
"""Run the LIF over a 1D array of input currents.
Returns membrane potentials and spikes over time.
"""
if reset:
lif_module.reset_state()
# Safely get the length of inputs (robust for all array types)
inputs = u.math.asarray(inputs) # Ensure it's an array
n_steps = inputs.shape[0] if hasattr(inputs, 'shape') and len(inputs.shape) > 0 else 1
idx = np.arange(n_steps)
def step(i, x):
with brainstate.environ.context(i=i):
s = lif_module(x)
return lif_module.V.value, s
V_seq, S_seq = brainstate.transform.for_loop(step, idx, inputs)
return V_seq, S_seq
# Create and initialize the model
neuron = LIFDynamics(in_size=1)
brainstate.nn.init_all_states(neuron)
print(neuron)
LIFDynamics(
in_size=(1,),
out_size=(1,),
R=1. * ohm,
tau=5. * msecond,
V_th=1. * mvolt,
V_reset=0. * mvolt,
V_rest=0. * mvolt,
V_initializer=Constant(value=0.0 * mvolt),
spk_fun=ReluGrad(alpha=0.3, width=1.0),
spk_reset=soft,
V=HiddenState(
value=~float32[1] * mvolt
)
)
Transformation 1: for_loop#
The for_loop transformation is the workhorse of sequential simulation. It:
Iterates over time steps or input sequences
Automatically manages state updates between iterations
Optionally displays progress bars
Returns collected outputs from each step
Basic Usage#
The typical pattern is:
def step_function(index, *inputs):
# Your simulation logic here
with brainstate.environ.context(i=index):
output = model(*inputs)
return output
results = brainstate.transform.for_loop(step_function, indices, inputs)
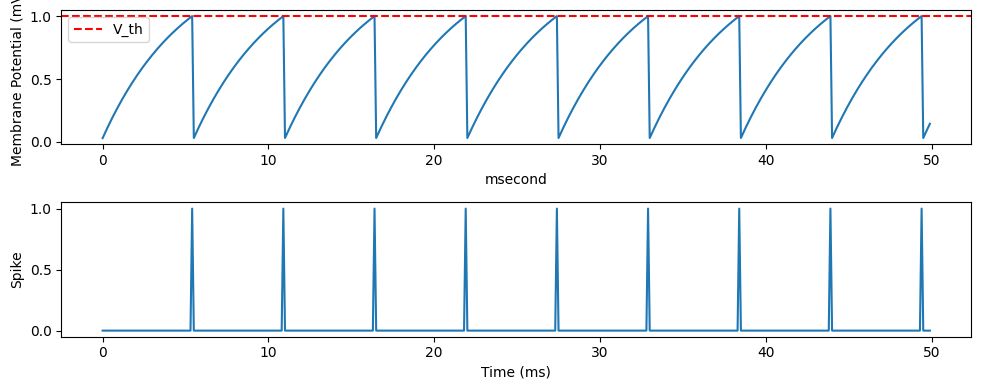
# Simulate for 500 time steps with constant input
n_steps = 500
inputs = np.ones(n_steps) * 1.5 * u.mA # Constant input current
# Run simulation using helper function
V_trace, spike_trace = run_lif(neuron, inputs)
# Plot results
times = np.arange(n_steps) * brainstate.environ.get_dt()
plt.figure(figsize=(10, 4))
plt.subplot(2, 1, 1)
plt.plot(times, V_trace)
plt.axhline(neuron.V_th.mantissa, color='r', linestyle='--', label='V_th')
plt.ylabel('Membrane Potential (mV)')
plt.legend()
plt.subplot(2, 1, 2)
plt.plot(times, spike_trace)
plt.ylabel('Spike')
plt.xlabel('Time (ms)')
plt.tight_layout()
plt.show()
Progress Bars#
For long simulations, you can add a progress bar:
# Long simulation with progress bar
n_steps = 10000
inputs = np.ones(n_steps) * 1.5 * u.mA
neuron.reset_state()
idx = np.arange(n_steps)
def step(i, x):
with brainstate.environ.context(i=i):
s = neuron(x)
return neuron.V.value, s
V_trace, spike_trace = brainstate.transform.for_loop(
step,
idx,
inputs,
pbar=brainstate.transform.ProgressBar(1000) # Update every 1000 steps
# or simply
# pbar=1000
)
print(f"Simulation completed: {n_steps} steps")
Simulation completed: 10000 steps
Transformation 2: jit (Just-In-Time Compilation)#
JIT compilation can dramatically speed up your simulations by compiling Python/NumPy code to optimized machine code. Use jit when:
You’re running long simulations
The function will be called many times
Performance is critical
Basic JIT Usage#
You can JIT-compile simulation functions. Note that we need to be careful with how we structure the code for JIT:
# Create a separate neuron for JIT example
jit_neuron = LIFDynamics(in_size=1)
brainstate.nn.init_all_states(jit_neuron)
def run_simulation_nojit(inputs):
"""Non-JIT simulation function."""
return run_lif(jit_neuron, inputs)
@brainstate.transform.jit
def run_simulation_jit(inputs):
"""JIT-compiled simulation function."""
return run_lif(jit_neuron, inputs)
# Benchmark
import time
inputs = np.ones(5000) * 1.5 * u.mA
# Non-JIT
start = time.time()
V1, S1 = run_simulation_nojit(inputs)
nojit_time = time.time() - start
# First JIT call: includes compilation (slower)
start = time.time()
V2, S2 = run_simulation_jit(inputs)
compile_time = time.time() - start
# Second JIT call: uses compiled version (much faster)
start = time.time()
V3, S3 = run_simulation_jit(inputs)
run_time = time.time() - start
print(f"No JIT: {nojit_time:.4f}s")
print(f"First JIT call (with compilation): {compile_time:.4f}s")
print(f"Second JIT call (compiled): {run_time:.4f}s")
if run_time > 0:
print(f"Speedup: {nojit_time/run_time:.1f}x")
else:
print(f"Speedup: Very fast (>1000x)")
No JIT: 0.0562s
First JIT call (with compilation): 0.0520s
Second JIT call (compiled): 0.0000s
Speedup: Very fast (>1000x)
Transformation 3: vmap (Vectorization)#
vmap (vectorized map) runs your function in parallel over a batch dimension. This is incredibly useful for:
Running multiple trials with different random seeds
Sweeping parameters
Processing multiple inputs simultaneously
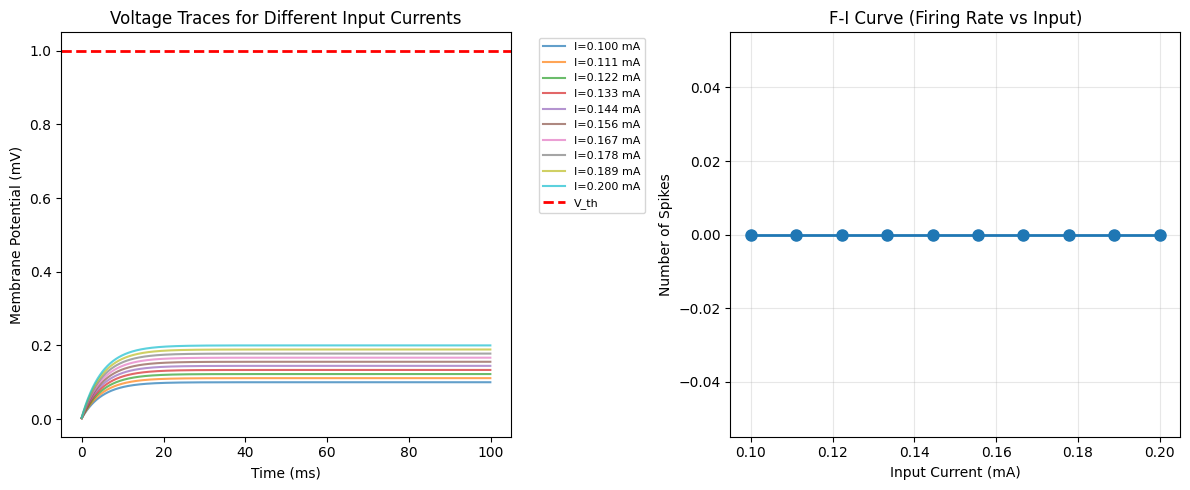
Running Multiple Trials#
Let’s run multiple trials with different input currents:
# Different input currents for each trial
batch_size = 10
n_steps = 1000
input_currents = np.linspace(0.1, 0.2, batch_size) * u.mA
# Create batched inputs: shape (batch, time)
inputs_list = []
for I in input_currents:
inputs_list.append(np.ones(n_steps) * I)
inputs_batched = u.math.asarray(inputs_list)
# IMPORTANT: Create NEW neuron instances inside vmap to avoid state conflicts
@brainstate.transform.vmap
def run_batched_trial(inp_seq):
"""Run simulation for a single input sequence.
Key Pattern: Create a fresh LIF instance for each vmap iteration.
This avoids BatchAxisError from shared state across iterations.
"""
lif_single = LIFDynamics(1)
brainstate.nn.init_all_states(lif_single)
# Safely get sequence length
inp_seq = u.math.asarray(inp_seq)
n_steps_local = inp_seq.shape[0] if hasattr(inp_seq, 'shape') and len(inp_seq.shape) > 0 else 1
idx = np.arange(n_steps_local)
def step(i, x):
with brainstate.environ.context(i=i):
s = lif_single(x)
return lif_single.V.value, s
return brainstate.transform.for_loop(step, idx, inp_seq)
# Run all trials in parallel
V_batch, S_batch = run_batched_trial(inputs_batched)
print(f"Output shape: V_batch={V_batch.shape}, S_batch={S_batch.shape}")
print(f"Expected: (batch={batch_size}, time={n_steps}, neurons=1)")
Output shape: V_batch=(10, 1000, 1), S_batch=(10, 1000, 1)
Expected: (batch=10, time=1000, neurons=1)
Visualizing Batch Results#
# Plot membrane potentials for all trials
times = np.arange(n_steps) * brainstate.environ.get_dt()
plt.figure(figsize=(12, 5))
plt.subplot(1, 2, 1)
for i in range(batch_size):
plt.plot(times, V_batch[i, :, 0].mantissa, alpha=0.7,
label=f'I={input_currents[i].mantissa:.3f} mA')
plt.axhline(1.0, color='r', linestyle='--', linewidth=2, label='V_th')
plt.xlabel('Time (ms)')
plt.ylabel('Membrane Potential (mV)')
plt.title('Voltage Traces for Different Input Currents')
plt.legend(bbox_to_anchor=(1.05, 1), loc='upper left', fontsize=8)
plt.subplot(1, 2, 2)
# Count spikes for each trial (threshold at 0.5)
spike_counts = []
for i in range(batch_size):
count = (np.asarray(S_batch[i]) >= 0.5).sum()
spike_counts.append(count)
plt.plot(input_currents.mantissa, spike_counts, 'o-', markersize=8, linewidth=2)
plt.xlabel('Input Current (mA)')
plt.ylabel('Number of Spikes')
plt.title('F-I Curve (Firing Rate vs Input)')
plt.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
Combining Transformations#
The real power comes from combining transformations. A common pattern is jit + vmap for fast, batched simulations:
# Combined JIT + vmap for maximum performance
import time
n_trials = 50
n_steps = 2000
# Create test inputs: same current for all trials
test_inputs_list = []
for _ in range(n_trials):
test_inputs_list.append(np.ones(n_steps) * 1.5 * u.mA)
test_inputs = u.math.asarray(test_inputs_list)
@brainstate.transform.jit
@brainstate.transform.vmap
def fast_batch_simulation(inp_seq):
"""JIT-compiled, vectorized simulation.
Creates a fresh neuron for each vmap iteration (best practice).
"""
lif_fast = LIFDynamics(1)
brainstate.nn.init_all_states(lif_fast)
# Safely get sequence length
inp_seq = u.math.asarray(inp_seq)
n_steps_local = inp_seq.shape[0] if hasattr(inp_seq, 'shape') and len(inp_seq.shape) > 0 else 1
idx = np.arange(n_steps_local)
def step(i, x):
with brainstate.environ.context(i=i):
s = lif_fast(x)
return lif_fast.V.value, s
return brainstate.transform.for_loop(step, idx, inp_seq)
# Warm-up compilation
_ = fast_batch_simulation(test_inputs)
# Timed run
start = time.time()
V_fast, S_fast = fast_batch_simulation(test_inputs)
elapsed = time.time() - start
print(f"Ran {n_trials} trials of {n_steps} steps in {elapsed:.4f}s")
print(f"Average time per trial: {elapsed/n_trials*1000:.2f}ms")
print(f"Time per step per trial: {elapsed/(n_trials*n_steps)*1e6:.2f}µs")
Ran 50 trials of 2000 steps in 0.0010s
Average time per trial: 0.02ms
Time per step per trial: 0.01µs
Transformation 4: map for Memory-Efficient Batching#
When you have many trials but limited memory, use map instead of vmap. It processes data in smaller batches sequentially:
# Simulate a scenario with many trials
n_trials_map = 100
n_steps_map = 1000
# Create inputs for all trials
large_inputs_list = []
for _ in range(n_trials_map):
large_inputs_list.append(np.ones(n_steps_map) * 1.5 * u.mA)
large_inputs = u.math.asarray(large_inputs_list)
@brainstate.transform.vmap
def single_trial_sim(inp_seq):
"""Single trial simulation - creates its own neuron instance."""
lif_trial = LIFDynamics(1)
brainstate.nn.init_all_states(lif_trial)
# Safely get sequence length
inp_seq = u.math.asarray(inp_seq)
n_steps_local = inp_seq.shape[0] if hasattr(inp_seq, 'shape') and len(inp_seq.shape) > 0 else 1
idx = np.arange(n_steps_local)
def step(i, x):
with brainstate.environ.context(i=i):
return lif_trial(x)
return brainstate.transform.for_loop(step, idx, inp_seq)
spike_results = single_trial_sim(large_inputs)
print(f"Processed {n_trials_map} trials")
print(f"Output shape: {spike_results.shape}")
total_spikes = 0
for i in range(n_trials_map):
spike_trace = spike_results[i]
if hasattr(spike_trace, '__len__'):
total_spikes += (np.asarray(spike_trace) >= 0.5).sum()
print(f"Total spikes across all trials: {total_spikes}")
Processed 100 trials
Output shape: (100, 1000, 1)
Total spikes across all trials: 1800
Advanced Pattern: Nested Loops#
Sometimes you need nested iteration (e.g., trials × time steps). Here’s a practical example with random noise:
nested_neuron = LIFDynamics(1)
brainstate.nn.init_all_states(nested_neuron)
n_trials_nest = 5
n_steps_nest = 500
def run_single_trial_noise(trial_idx):
"""Run one trial with a specific random seed."""
nested_neuron.reset_state()
# Generate noisy input for this trial
key = jax.random.PRNGKey(trial_idx)
base_current = 1.5 * u.mA
noise = jax.random.normal(key, (n_steps_nest,)) * 0.03 * u.mA
inputs = base_current + noise
# Run simulation and return spike count
_, spikes = run_lif(nested_neuron, inputs, reset=False)
# return (np.asarray(spikes) >= 0.5).sum()
spike_mask = spikes >= 0.5
spike_count = spike_mask.sum()
return spike_count
# Outer loop: iterate over trials
trial_indices = jnp.arange(n_trials_nest)
spike_counts = brainstate.transform.for_loop(
lambda i: run_single_trial_noise(i),
trial_indices
)
print(f"Spike counts per trial: {spike_counts}")
print(f"Mean: {spike_counts.mean():.1f}, Std: {spike_counts.std():.2f}")
Spike counts per trial: [9 9 9 9 9]
Mean: 9.0, Std: 0.00
Transformation 5: cond for Conditional Branching#
The cond transformation enables efficient conditional execution in JIT-compiled code. Unlike Python’s if/else, which are resolved at trace time, cond supports runtime conditionals that work seamlessly with JIT compilation.
Use cond when:
You need data-dependent branching inside JIT-compiled functions
Implementing different update rules based on runtime conditions
Switching between computational modes (e.g., training vs inference)
Basic Usage#
The basic pattern is:
result = brainstate.transform.cond(
predicate, # Boolean condition
true_fun, # Function called if True
false_fun, # Function called if False
operand # Passed to whichever function is called
)
Both true_fun and false_fun must accept the same input and return the same output type/shape.
# Simple example: Apply different scaling factors based on a threshold
def adaptive_scale(x, threshold):
"""Apply 2x scaling if x > threshold, otherwise apply 0.5x scaling."""
def high_branch(val):
return val * 2.0
def low_branch(val):
return val * 0.5
return brainstate.transform.cond(
x > threshold,
high_branch,
low_branch,
x
)
# Test with different values
test_vals = jnp.array([0.5, 1.0, 1.5, 2.0, 2.5])
threshold = 1.5
print("Input | Condition | Output")
print("------|-----------|-------")
for val in test_vals:
result = adaptive_scale(val, threshold)
cond_str = "high" if val > threshold else "low"
print(f"{val:.1f} | {cond_str:9s} | {result:.1f}")
Input | Condition | Output
------|-----------|-------
0.5 | low | 0.2
1.0 | low | 0.5
1.5 | low | 0.8
2.0 | high | 4.0
2.5 | high | 5.0
Using cond in Simulations#
A practical use case: applying different input currents to a neuron based on time:
# Simulate neuron with time-varying input using cond
cond_neuron = LIFDynamics(1)
brainstate.nn.init_all_states(cond_neuron)
n_steps_cond = 1000
switch_time = 500 # Switch input current at this step
def get_input_current(step_idx):
"""Return different input currents before/after switch_time."""
def early_phase(_):
return 1.2 * u.mA # Lower current
def late_phase(_):
return 1.8 * u.mA # Higher current
return brainstate.transform.cond(
step_idx < switch_time,
early_phase,
late_phase,
None # Operand (not used here)
)
# Run simulation
cond_neuron.reset_state()
idx_cond = np.arange(n_steps_cond)
def step_with_cond(i, _):
with brainstate.environ.context(i=i):
current = get_input_current(i)
spike = cond_neuron(current)
return current, cond_neuron.V.value, spike
currents, V_cond, spikes_cond = brainstate.transform.for_loop(
step_with_cond, idx_cond, jnp.zeros(n_steps_cond)
)
# Plot results
times_cond = np.arange(n_steps_cond) * brainstate.environ.get_dt()
fig, axes = plt.subplots(3, 1, figsize=(12, 9))
plt.subplots_adjust(left=0.08, right=0.98, top=0.95, bottom=0.05)
# Input current
axes[0].plot(times_cond, currents.mantissa,linewidth=1.5)
axes[0].axvline(switch_time * 0.1, color='r', linestyle='--', alpha=0.5)
axes[0].set_ylabel('Input (mA)')
axes[0].set_title('Time-Varying Input with cond')
axes[0].text(30, 1.5, 'Low current', ha='center')
axes[0].text(80, 1.5, 'High current', ha='center')
# Voltage
axes[1].plot(times_cond, V_cond[:, 0].mantissa)
axes[1].axhline(1.0, color='r', linestyle='--', alpha=0.5, label='V_th')
axes[1].axvline(switch_time * 0.1, color='r', linestyle='--', alpha=0.5)
axes[1].set_ylabel('Voltage (mV)')
axes[1].legend()
# Spikes
axes[2].plot(times_cond, spikes_cond[:, 0])
axes[2].axvline(switch_time * 0.1, color='r', linestyle='--', alpha=0.5, label='Switch point')
axes[2].set_ylabel('Spike')
axes[2].set_xlabel('Time (ms)')
axes[2].legend()
plt.tight_layout()
plt.show()
# Count spikes in each phase
early_spikes = (spikes_cond[:switch_time] >= 0.5).sum()
late_spikes = (spikes_cond[switch_time:] >= 0.5).sum()
print(f"Spikes in early phase (low current): {early_spikes}")
print(f"Spikes in late phase (high current): {late_spikes}")
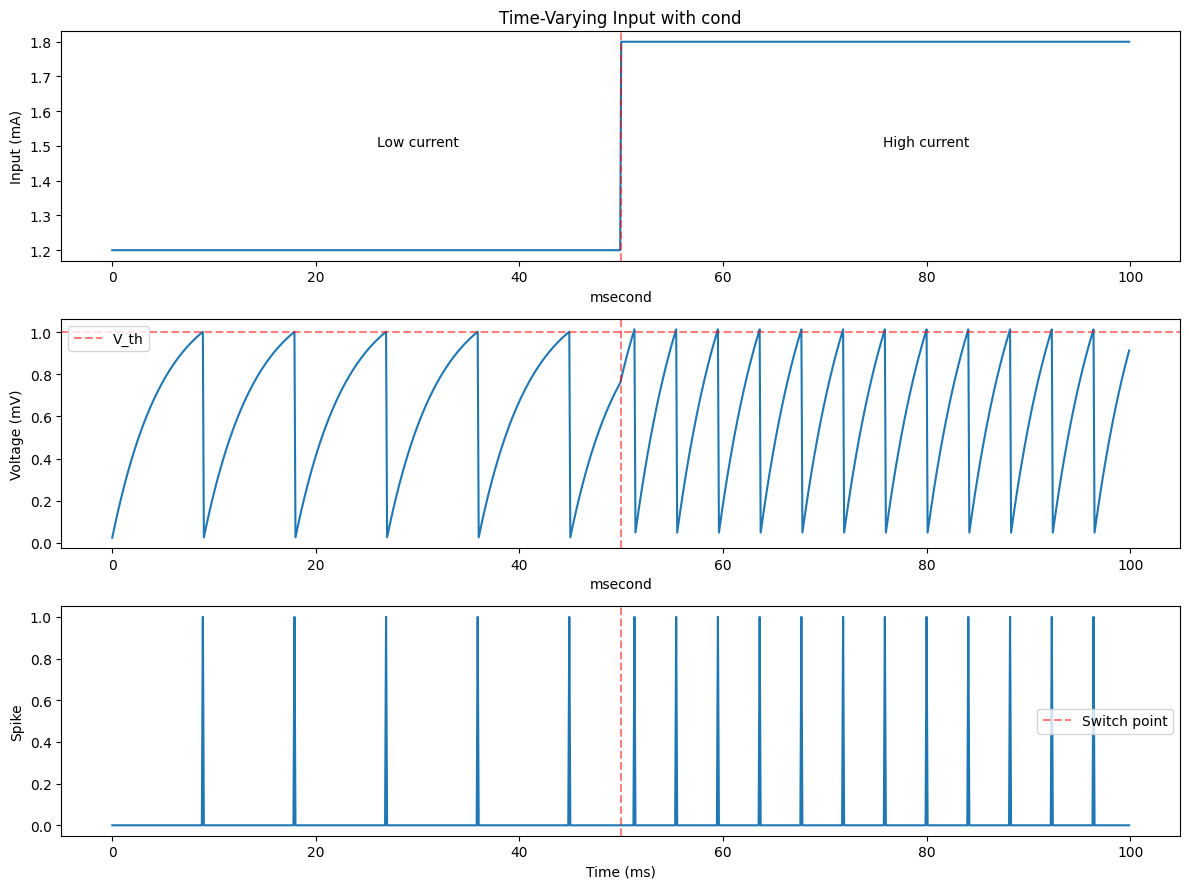
Spikes in early phase (low current): 5
Spikes in late phase (high current): 12
Transformation 6: grad for Automatic Differentiation#
The grad transformation computes gradients automatically, enabling optimization and learning in neural models. It supports differentiation with respect to:
Function arguments (standard autodiff)
Model parameters (
ParamStateobjects)Combinations of both
Basic Usage#
The basic pattern is:
grad_fn = brainstate.transform.grad(
fun, # Function to differentiate
argnums=None, # Which arguments to differentiate (int or list)
grad_states=None, # Which State objects to differentiate
has_aux=False, # Whether function returns (loss, aux_data)
return_value=False # Whether to return loss value with gradients
)
# Example 1: Computing gradients w.r.t. function arguments
def quadratic_loss(x, y):
"""Simple quadratic loss function."""
return jnp.sum((x - y) ** 2)
# Gradient w.r.t. first argument (x)
grad_fn_x = brainstate.transform.grad(quadratic_loss, argnums=0)
x = jnp.array([1.0, 2.0, 3.0])
y = jnp.array([0.5, 1.5, 2.5])
grad_x = grad_fn_x(x, y)
print(f"Input x: {x}")
print(f"Target y: {y}")
print(f"Gradient ∂L/∂x: {grad_x}")
print(f"Loss: {quadratic_loss(x, y):.4f}")
Input x: [1. 2. 3.]
Target y: [0.5 1.5 2.5]
Gradient ∂L/∂x: [1. 1. 1.]
Loss: 0.7500
# Gradient w.r.t. multiple arguments
grad_fn_both = brainstate.transform.grad(quadratic_loss, argnums=[0, 1])
grad_x, grad_y = grad_fn_both(x, y)
print(f"\nGradients w.r.t. both arguments:")
print(f"∂L/∂x: {grad_x}")
print(f"∂L/∂y: {grad_y}")
Gradients w.r.t. both arguments:
∂L/∂x: [1. 1. 1.]
∂L/∂y: [-1. -1. -1.]
Computing Gradients w.r.t. Model Parameters#
To train neural models, we need to differentiate with respect to ParamState objects. BrainState extends JAX’s autodiff to handle stateful parameters seamlessly:
# Example 2: Training a simple linear model
class LinearRegressor(brainstate.nn.Module):
"""Simple linear regression model: y = wx + b"""
def __init__(self, in_features: int):
super().__init__()
# Initialize parameters with small random values
key = jax.random.PRNGKey(0)
self.weight = brainstate.ParamState(jax.random.normal(key, (in_features, 1)) * 0.1)
self.bias = brainstate.ParamState(jnp.zeros((1,)))
def __call__(self, x):
return jnp.dot(x, self.weight.value) + self.bias.value
# Create model and training data
model = LinearRegressor(in_features=1)
# Generate synthetic data: y = 2x + 1 + noise
# Normalize input to [0, 1] for stability
key = jax.random.PRNGKey(42)
x_train = jax.random.uniform(key, (20, 1)) # Range [0, 1]
y_train = 2.0 * x_train + 1.0 + jax.random.normal(key, (20, 1)) * 0.1
# Define loss function
def compute_loss(x_data, y_data):
"""MSE loss for the model."""
predictions = model(x_data)
return jnp.mean((predictions - y_data) ** 2)
# Create gradient function w.r.t. all ParamState in model
# Gradients are returned as a list in the same order as grad_states
grad_fn = brainstate.transform.grad(
compute_loss,
grad_states=[model.weight, model.bias], # Explicit list order
return_value=True
)
# Training loop
learning_rate = 0.1
n_epochs = 150
print(f"Initial: weight={model.weight.value[0, 0]:.4f}, bias={model.bias.value[0]:.4f}")
for epoch in range(n_epochs):
# Compute gradients - returns tuple (grads_list, loss)
grads, loss = grad_fn(x_train, y_train)
# Unpack gradients list: [grad_weight, grad_bias]
grad_w, grad_b = grads
# Update parameters
model.weight.value = model.weight.value - learning_rate * grad_w
model.bias.value = model.bias.value - learning_rate * grad_b
if epoch % 20 == 0:
print(f"Epoch {epoch:3d}: loss={loss:.6f}, "
f"weight={model.weight.value[0, 0]:.4f}, "
f"bias={model.bias.value[0]:.4f}")
print(f"\nFinal: weight={model.weight.value[0, 0]:.4f}, bias={model.bias.value[0]:.4f}")
print(f"True parameters: weight=2.0000, bias=1.0000")
Initial: weight=0.1623, bias=0.0000
Epoch 0: loss=4.882305, weight=0.4485, bias=0.4302
Epoch 20: loss=0.053904, weight=1.3369, bias=1.4566
Epoch 40: loss=0.039217, weight=1.4816, bias=1.3671
Epoch 60: loss=0.028541, weight=1.6041, bias=1.2893
Epoch 80: loss=0.020774, weight=1.7085, bias=1.2229
Epoch 100: loss=0.015124, weight=1.7976, bias=1.1663
Epoch 120: loss=0.011013, weight=1.8736, bias=1.1180
Epoch 140: loss=0.008023, weight=1.9384, bias=1.0768
Final: weight=1.9644, bias=1.0603
True parameters: weight=2.0000, bias=1.0000
Summary#
You’ve learned the core transformations in brainstate:
Transformation |
Purpose |
When to Use |
|---|---|---|
|
Sequential iteration with state |
Time-step simulations, sequential data |
|
Compile to fast machine code |
Long/repeated simulations, performance critical |
|
Vectorize over batch dimension |
Multiple trials, parameter sweeps, batching |
|
Memory-efficient batching |
Large number of trials, limited memory |
|
Conditional branching in JIT code |
Event-driven dynamics, mode switching, adaptive behavior |
|
Automatic differentiation |
Training networks, optimizing parameters, learning rules |
For more detailed information about brainstate transformations and advanced features, please visit: