Training Recurrent Neural Networks: Integrator Task#
This tutorial demonstrates how to train a recurrent neural network (RNN) to perform an integration task - a fundamental computation in neuroscience where networks must accumulate evidence over time.
Learning Objectives#
By the end of this tutorial, you will:
Understand the integration task and its importance
Build custom RNN cells in BrainState
Train RNNs on temporal tasks
Use trainable initial states
Apply L2 regularization to prevent overfitting
Visualize RNN predictions on time-series data
The Integration Task#
Goal: Given a noisy input signal, the network must compute the cumulative sum (integral) over time.
Input: [x₁, x₂, x₃, ...]
Output: [x₁, x₁+x₂, x₁+x₂+x₃, ...]
This task requires:
Memory: Remember past inputs
Accumulation: Continuously integrate information
Robustness: Handle noise in inputs
Applications:
Evidence accumulation in decision-making
Position estimation from velocity
Financial modeling (cumulative returns)
Signal processing
Setup and Imports#
from typing import Callable
import jax
import jax.numpy as jnp
import matplotlib.pyplot as plt
import numpy as np
import brainstate
import braintools
# Set random seeds
np.random.seed(42)
brainstate.random.seed(42)
Configuration#
# Task parameters
dt = 0.04 # Time step
num_step = int(1.0 / dt) # Steps per trial (25 steps for 1.0 time unit)
num_batch = 512 # Batch size
# Network parameters
num_hidden = 100 # Hidden units in RNN
# Training parameters
learning_rate = 0.025
lr_decay_rate = 0.99975
l2_reg = 2e-4
num_epochs = 5
batches_per_epoch = 500
print(f"Configuration:")
print(f" Sequence length: {num_step} steps")
print(f" Batch size: {num_batch}")
print(f" Hidden units: {num_hidden}")
print(f" Training batches: {num_epochs * batches_per_epoch}")
Configuration:
Sequence length: 25 steps
Batch size: 512
Hidden units: 100
Training batches: 2500
Generate Data#
Data Generation Function#
We’ll create random walk inputs and compute their cumulative sums as targets:
@brainstate.transform.jit(static_argnums=2)
def build_inputs_and_targets(mean=0.025, scale=0.01, batch_size=10):
"""Generate integration task data.
Args:
mean: Mean of the random walk bias
scale: Standard deviation of noise
batch_size: Number of sequences
Returns:
inputs: [num_step, batch_size, 1] - Input sequences
targets: [num_step, batch_size, 1] - Target cumulative sums
"""
# Create initial bias
sample = brainstate.random.normal(size=(1, batch_size, 1))
bias = mean * 2.0 * (sample - 0.5)
# Generate white noise
samples = brainstate.random.normal(size=(num_step, batch_size, 1))
noise_t = scale / dt ** 0.5 * samples
# Inputs = bias + noise
inputs = bias + noise_t
# Targets = cumulative sum of inputs
targets = jnp.cumsum(inputs, axis=0)
return inputs, targets
def train_data():
"""Generator for training data."""
for _ in range(batches_per_epoch * num_epochs):
yield build_inputs_and_targets(0.025, 0.01, num_batch)
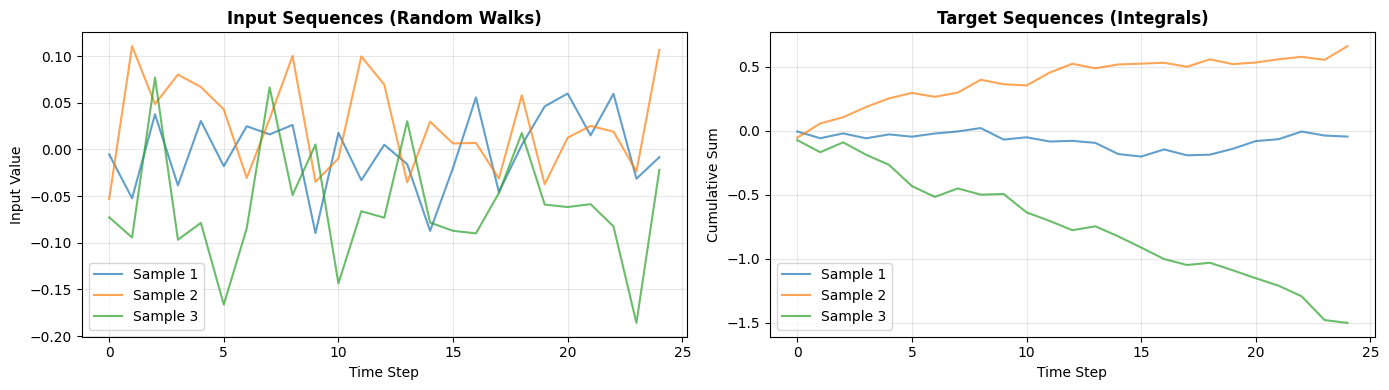
Visualize Sample Data#
# Generate one batch for visualization
sample_inputs, sample_targets = build_inputs_and_targets(0.025, 0.01, 3)
fig, axes = plt.subplots(1, 2, figsize=(14, 4))
# Plot inputs
for i in range(3):
axes[0].plot(sample_inputs[:, i, 0], alpha=0.7, label=f'Sample {i+1}')
axes[0].set_xlabel('Time Step')
axes[0].set_ylabel('Input Value')
axes[0].set_title('Input Sequences (Random Walks)', fontweight='bold')
axes[0].legend()
axes[0].grid(True, alpha=0.3)
# Plot targets
for i in range(3):
axes[1].plot(sample_targets[:, i, 0], alpha=0.7, label=f'Sample {i+1}')
axes[1].set_xlabel('Time Step')
axes[1].set_ylabel('Cumulative Sum')
axes[1].set_title('Target Sequences (Integrals)', fontweight='bold')
axes[1].legend()
axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
Building the RNN#
Custom RNN Cell#
We’ll create a vanilla RNN cell with optional trainable initial state:
class RNNCell(brainstate.nn.Module):
"""Vanilla RNN cell with trainable weights.
h_t = activation(W_combined @ [x_t; h_{t-1}] + b)
"""
def __init__(
self,
num_in: int,
num_out: int,
state_initializer: Callable = braintools.init.ZeroInit(),
w_initializer: Callable = braintools.init.XavierNormal(),
b_initializer: Callable = braintools.init.ZeroInit(),
activation: Callable = brainstate.nn.relu,
train_state: bool = False, # Whether to train initial state
):
super().__init__()
self.num_out = num_out
self.train_state = train_state
# Activation function
self.activation = activation
# Combined weight matrix [input; hidden] -> hidden
W = braintools.init.param(
w_initializer,
(num_in + num_out, num_out)
)
b = braintools.init.param(b_initializer, (num_out,))
self.W = brainstate.ParamState(W)
self.b = brainstate.ParamState(b) if b is not None else None
# Trainable initial state (optional)
if train_state:
self.state2train = brainstate.ParamState(
braintools.init.ZeroInit()(num_out)
)
self._state_initializer = state_initializer
def init_state(self, batch_size=None, **kwargs):
"""Initialize hidden state."""
self.state = brainstate.HiddenState(
braintools.init.param(
self._state_initializer,
(self.num_out,),
batch_size
)
)
# Use trainable initial state if specified
if self.train_state:
self.state.value = jnp.repeat(
jnp.expand_dims(self.state2train.value, axis=0),
batch_size,
axis=0
)
def update(self, x):
"""Update RNN cell for one time step.
Args:
x: Input [batch, input_dim]
Returns:
h: New hidden state [batch, hidden_dim]
"""
# Concatenate input and previous hidden state
x_combined = jnp.concatenate([x, self.state.value], axis=-1)
# Linear transformation
h = x_combined @ self.W.value
if self.b is not None:
h += self.b.value
# Apply activation
h = self.activation(h)
# Update state
self.state.value = h
return h
Complete RNN Network#
class RNN(brainstate.nn.Module):
"""RNN with recurrent layer and linear output."""
def __init__(self, num_in, num_hidden):
super().__init__()
# RNN layer with trainable initial state
self.rnn = RNNCell(num_in, num_hidden, train_state=True)
# Output projection
self.out = brainstate.nn.Linear(num_hidden, 1)
def update(self, x):
"""Process one time step.
Args:
x: Input at current time step
Returns:
output: Prediction at current time step
"""
# RNN forward pass using >> operator (pipe)
return x >> self.rnn >> self.out
Create Model and Optimizer#
# Create RNN model
model = RNN(num_in=1, num_hidden=num_hidden)
# Get trainable parameters
weights = model.states(brainstate.ParamState)
# Create optimizer with learning rate decay
lr_schedule = braintools.optim.ExponentialDecayLR(
learning_rate,
decay_steps=1,
decay_rate=lr_decay_rate
)
optimizer = braintools.optim.Adam(lr=lr_schedule, eps=1e-1)
optimizer.register_trainable_weights(weights)
brainstate.nn.count_parameters(model)
+------------------------+------------+
| Modules | Parameters |
+------------------------+------------+
| ('out', 'weight') | 101 |
| ('rnn', 'W') | 10.10K |
| ('rnn', 'b') | 100 |
| ('rnn', 'state2train') | 100 |
| Total | 10.40K |
+------------------------+------------+
10401
Training the RNN#
Define Prediction and Loss Functions#
@brainstate.transform.jit
def f_predict(inputs):
"""Make predictions for a sequence.
Args:
inputs: [num_steps, batch_size, 1]
Returns:
predictions: [num_steps, batch_size, 1]
"""
# Initialize RNN state
brainstate.nn.init_all_states(model, batch_size=inputs.shape[1])
# Process sequence
return brainstate.transform.for_loop(model.update, inputs)
def f_loss(inputs, targets, l2_reg=2e-4):
"""Compute loss with L2 regularization.
Args:
inputs: Input sequences
targets: Target sequences
l2_reg: L2 regularization coefficient
Returns:
loss: Total loss value
"""
# Get predictions
predictions = f_predict(inputs)
# Mean squared error
mse = braintools.metric.squared_error(predictions, targets).mean()
# L2 regularization on weights
l2 = 0.0
for weight in weights.values():
for leaf in jax.tree.leaves(weight.value):
l2 += jnp.sum(leaf ** 2)
return mse + l2_reg * l2
Define Training Step#
@brainstate.transform.jit
def f_train(inputs, targets):
"""Perform one training step.
Args:
inputs: Input sequences
targets: Target sequences
Returns:
loss: Loss value
"""
# Compute gradients
grads, loss = brainstate.transform.grad(
f_loss,
weights,
return_value=True
)(inputs, targets)
# Update parameters
optimizer.update(grads)
return loss
Run Training Loop#
print("Starting training...\n")
for i_epoch in range(num_epochs):
epoch_losses = []
for i_batch, (inputs, targets) in enumerate(train_data()):
if i_batch >= batches_per_epoch:
break
loss = f_train(inputs, targets)
epoch_losses.append(float(loss))
if (i_batch + 1) % 100 == 0:
avg_loss = np.mean(epoch_losses[-100:])
print(f'Epoch {i_epoch}, Batch {i_batch + 1:3d}, Loss {avg_loss:.5f}')
avg_epoch_loss = np.mean(epoch_losses)
print(f'\nEpoch {i_epoch} completed: Avg Loss = {avg_epoch_loss:.5f}\n')
print("Training complete!")
Starting training...
Epoch 0, Batch 100, Loss 0.19316
Epoch 0, Batch 200, Loss 0.02372
Epoch 0, Batch 300, Loss 0.02119
Epoch 0, Batch 400, Loss 0.02136
Epoch 0, Batch 500, Loss 0.04400
Epoch 0 completed: Avg Loss = 0.06069
Epoch 1, Batch 100, Loss 0.02979
Epoch 1, Batch 200, Loss 0.01970
Epoch 1, Batch 300, Loss 0.01925
Epoch 1, Batch 400, Loss 0.01887
Epoch 1, Batch 500, Loss 0.01854
Epoch 1 completed: Avg Loss = 0.02123
Epoch 2, Batch 100, Loss 0.01823
Epoch 2, Batch 200, Loss 0.01819
Epoch 2, Batch 300, Loss 0.01765
Epoch 2, Batch 400, Loss 0.01752
Epoch 2, Batch 500, Loss 0.01741
Epoch 2 completed: Avg Loss = 0.01780
Epoch 3, Batch 100, Loss 0.01673
Epoch 3, Batch 200, Loss 0.01644
Epoch 3, Batch 300, Loss 0.01648
Epoch 3, Batch 400, Loss 0.01619
Epoch 3, Batch 500, Loss 0.01601
Epoch 3 completed: Avg Loss = 0.01637
Epoch 4, Batch 100, Loss 0.01526
Epoch 4, Batch 200, Loss 0.09099
Epoch 4, Batch 300, Loss 0.03909
Epoch 4, Batch 400, Loss 0.01513
Epoch 4, Batch 500, Loss 0.01464
Epoch 4 completed: Avg Loss = 0.03502
Training complete!
Evaluation and Visualization#
Test on New Data#
# Generate test data
brainstate.nn.init_all_states(model, 1)
x_test, y_test = build_inputs_and_targets(0.025, 0.01, 1)
predictions = f_predict(x_test)
print(f"Test data generated:")
print(f" Input shape: {x_test.shape}")
print(f" Target shape: {y_test.shape}")
print(f" Prediction shape: {predictions.shape}")
Test data generated:
Input shape: (25, 1, 1)
Target shape: (25, 1, 1)
Prediction shape: (25, 1, 1)
Plot Predictions vs. Ground Truth#
plt.figure(figsize=(12, 5))
# Convert to numpy for plotting
y_true = np.asarray(y_test[:, 0]).flatten()
y_pred = np.asarray(predictions[:, 0]).flatten()
time_steps = np.arange(len(y_true))
# Plot ground truth and predictions
plt.plot(time_steps, y_true, 'b-', linewidth=2, label='Ground Truth', alpha=0.7)
plt.plot(time_steps, y_pred, 'r--', linewidth=2, label='RNN Prediction', alpha=0.7)
plt.xlabel('Time Step', fontsize=12)
plt.ylabel('Cumulative Value', fontsize=12)
plt.title('RNN Integration Task Performance', fontsize=14, fontweight='bold')
plt.legend(fontsize=11)
plt.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
# Compute final error
mse = np.mean((y_true - y_pred) ** 2)
print(f"\nTest MSE: {mse:.6f}")
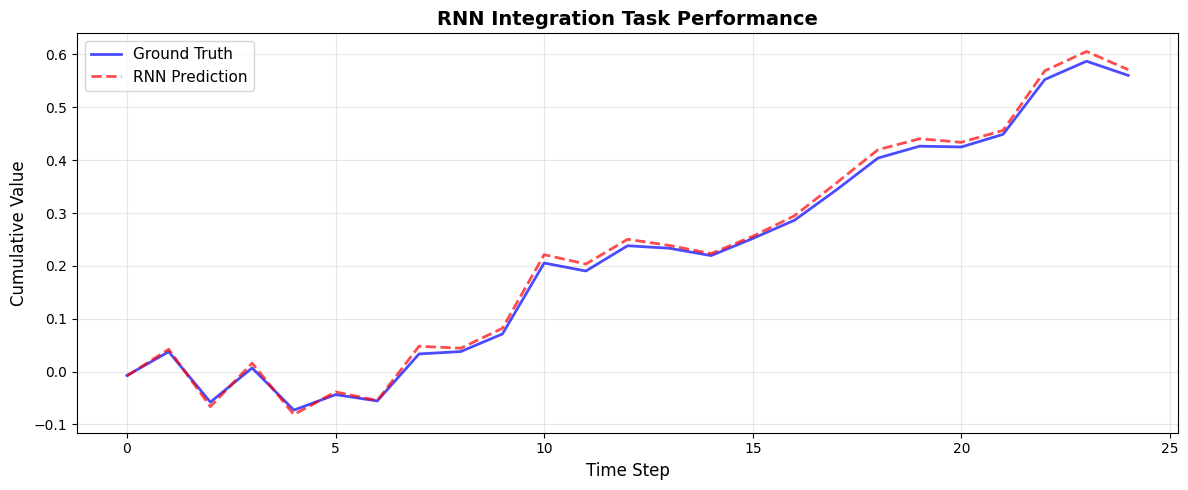
Test MSE: 0.000113