Activation Functions and Normalization#
Activation functions and normalization layers are critical components that enable deep neural networks to learn complex patterns and train stably.
In this tutorial, you will learn:
🎯 Activation Functions - ReLU, GELU, Sigmoid, Tanh and variants
📊 Batch Normalization - Stabilizing training with BatchNorm
📐 Layer Normalization - Alternative normalization for sequences
🔲 Group Normalization - For small batch sizes
⚖️ When to use each - Practical guidelines
Why Are These Important?#
Activation Functions introduce non-linearity, allowing networks to learn complex patterns
Normalization Layers stabilize training, accelerate convergence, and act as regularizers
import brainstate
import jax.numpy as jnp
import matplotlib.pyplot as plt
import numpy as np
1. Activation Functions#
Activation functions determine the output of a neuron given its input.
ReLU Family#
Standard ReLU#
# ReLU: max(0, x)
relu = brainstate.nn.ReLU()
x = jnp.linspace(-3, 3, 100)
y = relu(x)
plt.figure(figsize=(10, 4))
plt.subplot(1, 2, 1)
plt.plot(x, y, linewidth=2, label='ReLU')
plt.axhline(0, color='gray', linestyle='--', alpha=0.3)
plt.axvline(0, color='gray', linestyle='--', alpha=0.3)
plt.grid(alpha=0.3)
plt.xlabel('Input')
plt.ylabel('Output')
plt.title('ReLU Activation', fontweight='bold')
plt.legend()
# Test with data
test_input = jnp.array([-2, -1, 0, 1, 2])
test_output = relu(test_input)
plt.subplot(1, 2, 2)
plt.stem(test_input, test_output, basefmt=' ')
plt.xlabel('Input')
plt.ylabel('Output')
plt.title('ReLU on Sample Points', fontweight='bold')
plt.grid(alpha=0.3)
plt.tight_layout()
plt.show()
print(f"Input: {test_input}")
print(f"Output: {test_output}")
print("\n✅ Advantages: Simple, fast, no gradient vanishing for positive values")
print("⚠️ Issue: 'Dying ReLU' problem when neurons always output 0")
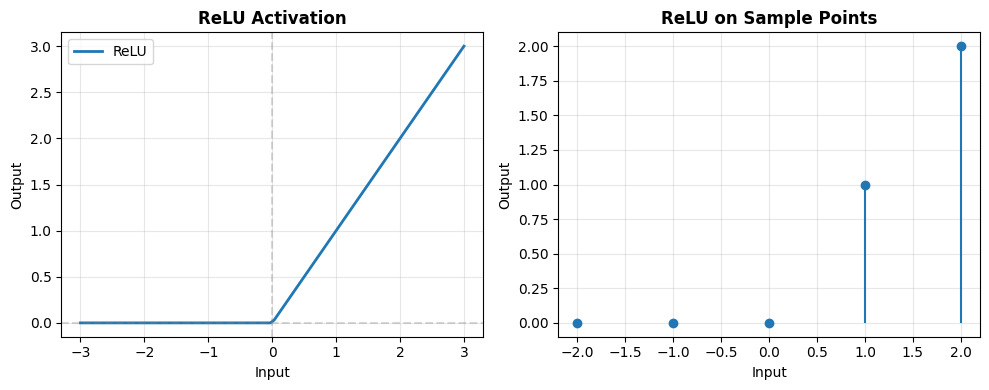
Input: [-2 -1 0 1 2]
Output: [0 0 0 1 2]
✅ Advantages: Simple, fast, no gradient vanishing for positive values
⚠️ Issue: 'Dying ReLU' problem when neurons always output 0
Leaky ReLU#
# LeakyReLU: max(alpha * x, x)
leaky_relu = brainstate.nn.LeakyReLU(negative_slope=0.1)
y_leaky = leaky_relu(x)
plt.figure(figsize=(8, 5))
plt.plot(x, y, linewidth=2, label='ReLU', alpha=0.5)
plt.plot(x, y_leaky, linewidth=2, label='Leaky ReLU (α=0.1)')
plt.axhline(0, color='gray', linestyle='--', alpha=0.3)
plt.axvline(0, color='gray', linestyle='--', alpha=0.3)
plt.grid(alpha=0.3)
plt.xlabel('Input')
plt.ylabel('Output')
plt.title('ReLU vs Leaky ReLU', fontweight='bold')
plt.legend()
plt.show()
print("✅ Advantage: Allows small gradient for negative values")
print(" Helps prevent dying ReLU problem")
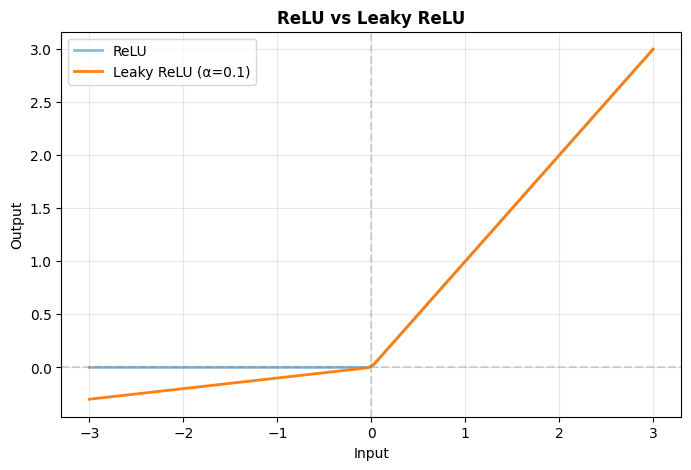
✅ Advantage: Allows small gradient for negative values
Helps prevent dying ReLU problem
Modern Activation Functions#
GELU (Gaussian Error Linear Unit)#
# GELU: Smooth, probabilistic activation
gelu = brainstate.nn.GELU()
y_gelu = gelu(x)
plt.figure(figsize=(8, 5))
plt.plot(x, y, linewidth=2, label='ReLU', alpha=0.5)
plt.plot(x, y_gelu, linewidth=2, label='GELU')
plt.axhline(0, color='gray', linestyle='--', alpha=0.3)
plt.axvline(0, color='gray', linestyle='--', alpha=0.3)
plt.grid(alpha=0.3)
plt.xlabel('Input')
plt.ylabel('Output')
plt.title('ReLU vs GELU', fontweight='bold')
plt.legend()
plt.show()
print("✅ Used in Transformers (BERT, GPT)")
print("✅ Smooth, differentiable everywhere")
print("✅ Stochastic regularization properties")
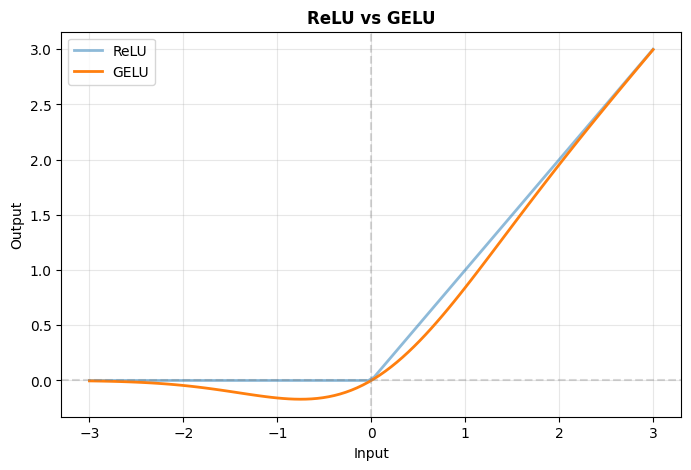
✅ Used in Transformers (BERT, GPT)
✅ Smooth, differentiable everywhere
✅ Stochastic regularization properties
Classic Activations#
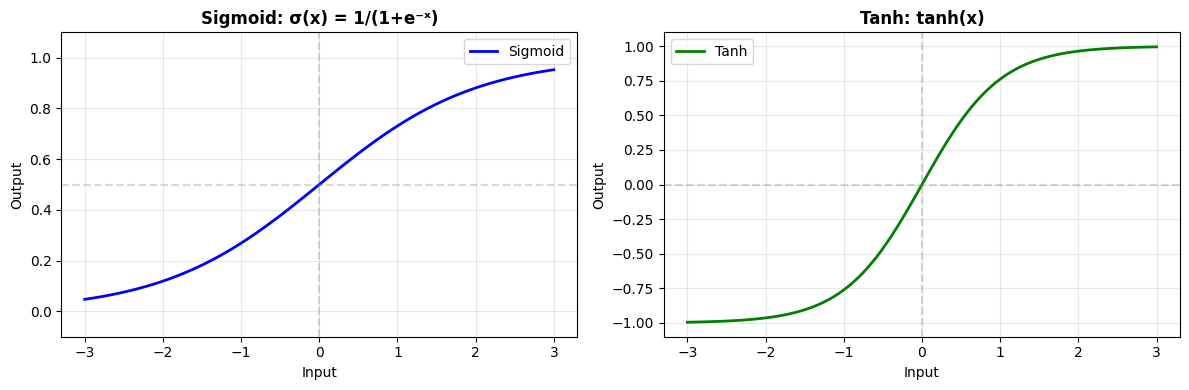
Sigmoid and Tanh#
# Sigmoid: 1 / (1 + exp(-x))
sigmoid = brainstate.nn.Sigmoid()
# Tanh: (exp(x) - exp(-x)) / (exp(x) + exp(-x))
tanh = brainstate.nn.Tanh()
y_sigmoid = sigmoid(x)
y_tanh = tanh(x)
plt.figure(figsize=(12, 4))
plt.subplot(1, 2, 1)
plt.plot(x, y_sigmoid, linewidth=2, label='Sigmoid', color='blue')
plt.axhline(0.5, color='gray', linestyle='--', alpha=0.3)
plt.axvline(0, color='gray', linestyle='--', alpha=0.3)
plt.grid(alpha=0.3)
plt.xlabel('Input')
plt.ylabel('Output')
plt.title('Sigmoid: σ(x) = 1/(1+e⁻ˣ)', fontweight='bold')
plt.legend()
plt.ylim([-0.1, 1.1])
plt.subplot(1, 2, 2)
plt.plot(x, y_tanh, linewidth=2, label='Tanh', color='green')
plt.axhline(0, color='gray', linestyle='--', alpha=0.3)
plt.axvline(0, color='gray', linestyle='--', alpha=0.3)
plt.grid(alpha=0.3)
plt.xlabel('Input')
plt.ylabel('Output')
plt.title('Tanh: tanh(x)', fontweight='bold')
plt.legend()
plt.ylim([-1.1, 1.1])
plt.tight_layout()
plt.show()
print("Sigmoid:")
print(" ✅ Output range: (0, 1) - good for probabilities")
print(" ⚠️ Vanishing gradients for large |x|")
print("\nTanh:")
print(" ✅ Output range: (-1, 1) - zero-centered")
print(" ⚠️ Also suffers from vanishing gradients")
print(" 📝 Often used in RNN/LSTM gates")
Sigmoid:
✅ Output range: (0, 1) - good for probabilities
⚠️ Vanishing gradients for large |x|
Tanh:
✅ Output range: (-1, 1) - zero-centered
⚠️ Also suffers from vanishing gradients
📝 Often used in RNN/LSTM gates
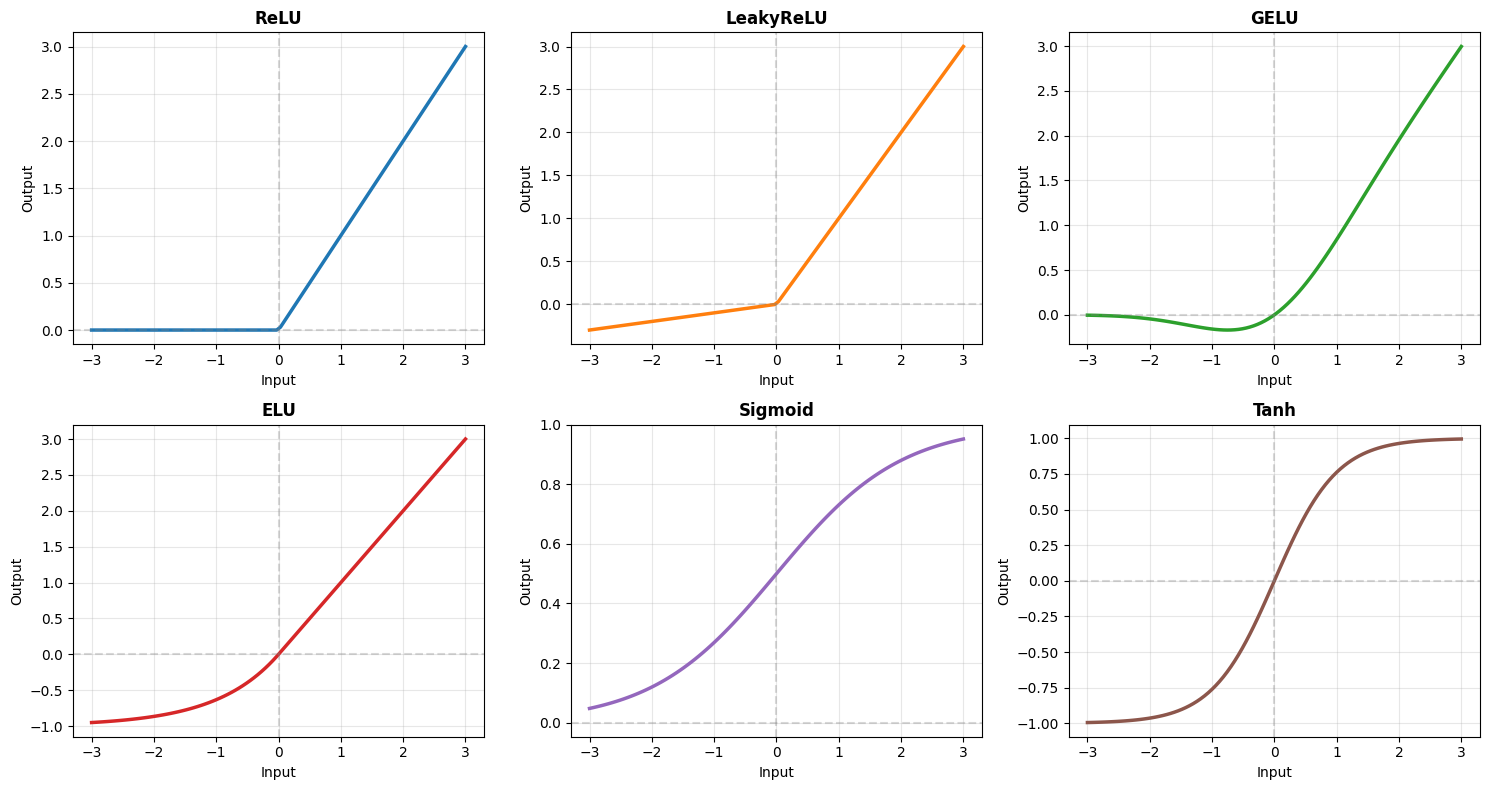
Comparing All Activations#
# Compare multiple activations
activations = {
'ReLU': brainstate.nn.ReLU(),
'LeakyReLU': brainstate.nn.LeakyReLU(0.1),
'GELU': brainstate.nn.GELU(),
'ELU': brainstate.nn.ELU(),
'Sigmoid': brainstate.nn.Sigmoid(),
'Tanh': brainstate.nn.Tanh(),
}
fig, axes = plt.subplots(2, 3, figsize=(15, 8))
axes = axes.flatten()
for idx, (name, activation) in enumerate(activations.items()):
y_act = activation(x)
axes[idx].plot(x, y_act, linewidth=2.5, color=f'C{idx}')
axes[idx].axhline(0, color='gray', linestyle='--', alpha=0.3)
axes[idx].axvline(0, color='gray', linestyle='--', alpha=0.3)
axes[idx].grid(alpha=0.3)
axes[idx].set_xlabel('Input', fontsize=10)
axes[idx].set_ylabel('Output', fontsize=10)
axes[idx].set_title(name, fontsize=12, fontweight='bold')
plt.tight_layout()
plt.show()
print("\n📊 Activation Function Guide:\n")
print("ReLU: Default choice, fast, works well in most cases")
print("LeakyReLU: When dying ReLU is a problem")
print("GELU: Transformers, NLP models")
print("ELU: Smooth variant of ReLU with negative values")
print("Sigmoid: Output layer for binary classification")
print("Tanh: RNN/LSTM gates, when zero-centered output needed")
📊 Activation Function Guide:
ReLU: Default choice, fast, works well in most cases
LeakyReLU: When dying ReLU is a problem
GELU: Transformers, NLP models
ELU: Smooth variant of ReLU with negative values
Sigmoid: Output layer for binary classification
Tanh: RNN/LSTM gates, when zero-centered output needed
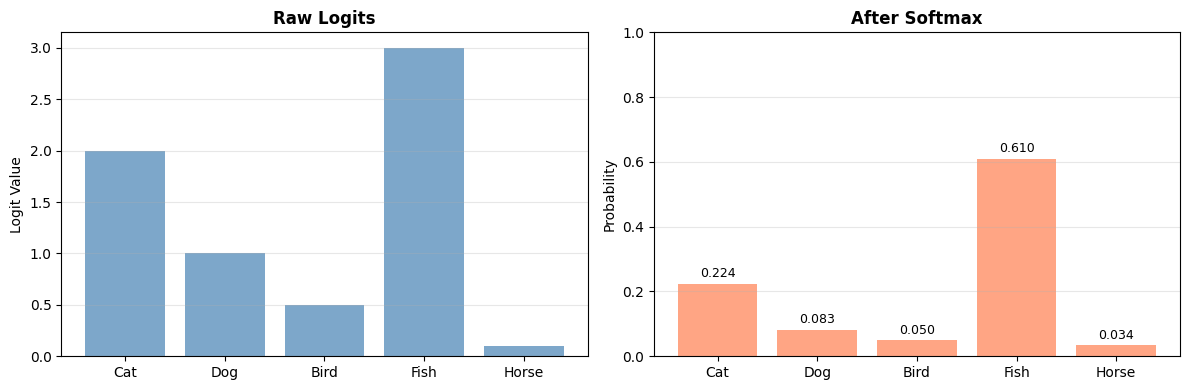
Softmax - For Classification#
# Softmax: converts logits to probabilities
softmax = brainstate.nn.Softmax()
# Example logits from a classifier
logits = jnp.array([2.0, 1.0, 0.5, 3.0, 0.1])
probs = softmax(logits)
print("Logits: ", logits)
print("Probabilities:", probs)
print(f"Sum of probs: {jnp.sum(probs):.6f} (should be 1.0)")
# Visualize
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
classes = ['Cat', 'Dog', 'Bird', 'Fish', 'Horse']
axes[0].bar(classes, logits, color='steelblue', alpha=0.7)
axes[0].set_ylabel('Logit Value')
axes[0].set_title('Raw Logits', fontweight='bold')
axes[0].grid(axis='y', alpha=0.3)
axes[1].bar(classes, probs, color='coral', alpha=0.7)
axes[1].set_ylabel('Probability')
axes[1].set_title('After Softmax', fontweight='bold')
axes[1].set_ylim([0, 1])
axes[1].grid(axis='y', alpha=0.3)
# Add values on bars
for i, v in enumerate(probs):
axes[1].text(i, v + 0.02, f'{v:.3f}', ha='center', fontsize=9)
plt.tight_layout()
plt.show()
print("\n✅ Softmax converts logits to valid probability distribution")
print(" Use for multi-class classification output layer")
Logits: [2. 1. 0.5 3. 0.1]
Probabilities: [0.22427258 0.08250527 0.05004197 0.60963607 0.03354414]
Sum of probs: 1.000000 (should be 1.0)
✅ Softmax converts logits to valid probability distribution
Use for multi-class classification output layer
2. Normalization Layers#
Normalization stabilizes training by controlling the distribution of activations.
Batch Normalization#
# BatchNorm: Normalizes across batch dimension
brainstate.random.seed(42)
batch_norm = brainstate.nn.BatchNorm0d((10,))
print("BatchNorm0d:")
print(batch_norm)
# Create batch of data with varying statistics
batch_size = 32
features = 10
x = brainstate.random.randn(batch_size, features) * 5 + 10 # mean≈10, std≈5
print()
print("Before BatchNorm:")
print(f" Mean: {jnp.mean(x, axis=0)[:3]}...")
print(f" Std: {jnp.std(x, axis=0)[:3]}...")
# Apply batch norm
with brainstate.environ.context(fit=True):
y = batch_norm(x)
print()
print("After BatchNorm:")
print(f" Mean: {jnp.mean(y, axis=0)[:3]}...")
print(f" Std: {jnp.std(y, axis=0)[:3]}...")
print()
print("✅ Normalizes to ~mean=0, ~std=1 across batch")
print("✅ Learns scale (γ) and shift (β) parameters")
BatchNorm0d:
BatchNorm0d(
in_size=(10,),
out_size=(10,),
affine=True,
bias_initializer=Constant(
value=0.0
),
scale_initializer=Constant(
value=1.0
),
dtype=<class 'numpy.float32'>,
track_running_stats=True,
momentum=Array(0.99, dtype=float32),
epsilon=Array(1.e-05, dtype=float32),
use_fast_variance=True,
feature_axes=(0,),
axis_name=None,
axis_index_groups=None,
running_mean=BatchState(
value=ShapedArray(float32[10])
),
running_var=BatchState(
value=ShapedArray(float32[10])
),
weight=NormalizationParamState(
value={
'bias': ShapedArray(float32[10]),
'scale': ShapedArray(float32[10])
}
)
)
Before BatchNorm:
Mean: [10.531552 10.173284 9.421941]...
Std: [4.4984775 4.850637 4.945446 ]...
After BatchNorm:
Mean: [ 2.0861626e-07 -5.5879354e-08 2.3096800e-07]...
Std: [0.99999964 0.9999995 0.9999993 ]...
✅ Normalizes to ~mean=0, ~std=1 across batch
✅ Learns scale (γ) and shift (β) parameters
Visualizing BatchNorm Effect#
# Generate data with different distributions
brainstate.random.seed(0)
x1 = brainstate.random.randn(1000) * 10 + 50 # High variance, high mean
x2 = brainstate.random.randn(1000) * 2 - 5 # Low variance, negative mean
# Create batch norm (treating as batch dimension)
bn = brainstate.nn.BatchNorm0d((1,))
# Reshape to (batch, features)
x1_batch = x1[:, None]
x2_batch = x2[:, None]
# Apply normalization
with brainstate.environ.context(fit=True):
y1 = bn(x1_batch).flatten()
y2 = bn(x2_batch).flatten()
fig, axes = plt.subplots(2, 2, figsize=(12, 8))
# Distribution 1 - before
axes[0, 0].hist(np.array(x1), bins=50, alpha=0.7, color='blue', edgecolor='black')
axes[0, 0].set_title('Distribution 1 - Before BN', fontweight='bold')
axes[0, 0].set_xlabel('Value')
axes[0, 0].set_ylabel('Frequency')
axes[0, 0].axvline(jnp.mean(x1), color='red', linestyle='--', label=f'μ={jnp.mean(x1):.1f}')
axes[0, 0].legend()
# Distribution 1 - after
axes[0, 1].hist(np.array(y1), bins=50, alpha=0.7, color='green', edgecolor='black')
axes[0, 1].set_title('Distribution 1 - After BN', fontweight='bold')
axes[0, 1].set_xlabel('Value')
axes[0, 1].set_ylabel('Frequency')
axes[0, 1].axvline(jnp.mean(y1), color='red', linestyle='--', label=f'μ={jnp.mean(y1):.2f}')
axes[0, 1].legend()
# Distribution 2 - before
axes[1, 0].hist(np.array(x2), bins=50, alpha=0.7, color='blue', edgecolor='black')
axes[1, 0].set_title('Distribution 2 - Before BN', fontweight='bold')
axes[1, 0].set_xlabel('Value')
axes[1, 0].set_ylabel('Frequency')
axes[1, 0].axvline(jnp.mean(x2), color='red', linestyle='--', label=f'μ={jnp.mean(x2):.1f}')
axes[1, 0].legend()
# Distribution 2 - after
axes[1, 1].hist(np.array(y2), bins=50, alpha=0.7, color='green', edgecolor='black')
axes[1, 1].set_title('Distribution 2 - After BN', fontweight='bold')
axes[1, 1].set_xlabel('Value')
axes[1, 1].set_ylabel('Frequency')
axes[1, 1].axvline(jnp.mean(y2), color='red', linestyle='--', label=f'μ={jnp.mean(y2):.2f}')
axes[1, 1].legend()
plt.tight_layout()
plt.show()
print("BatchNorm standardizes different distributions to similar scale")

BatchNorm standardizes different distributions to similar scale
Layer Normalization#
# LayerNorm: Normalizes across features (not batch)
layer_norm = brainstate.nn.LayerNorm((10,))
print("LayerNorm:")
print(layer_norm)
# Single sample
x_single = brainstate.random.randn(10) * 5 + 10
print()
print("Before LayerNorm (single sample):")
print(f" Values: {x_single}")
print(f" Mean: {jnp.mean(x_single):.3f}")
print(f" Std: {jnp.std(x_single):.3f}")
y_single = layer_norm(x_single)
print()
print("After LayerNorm:")
print(f" Values: {y_single}")
print(f" Mean: {jnp.mean(y_single):.3f}")
print(f" Std: {jnp.std(y_single):.3f}")
print()
print("✅ LayerNorm works on single samples")
print("✅ Popular in Transformers and RNNs")
print("✅ Independent of batch size")
LayerNorm:
LayerNorm(
in_size=(10,),
out_size=(10,),
feature_axes=(0,),
reduction_axes=(-1,),
axis_name=None,
axis_index_groups=None,
weight=NormalizationParamState(
value={
'bias': ShapedArray(float32[10]),
'scale': ShapedArray(float32[10])
}
),
epsilon=1e-06,
dtype=<class 'numpy.float32'>,
use_bias=True,
use_scale=True,
bias_init=ZeroInit(
unit=Unit(10.0^0)
),
scale_init=Constant(
value=1.0
),
use_fast_variance=True
)
Before LayerNorm (single sample):
Values: [ 3.0611591 13.874271 17.702465 19.20955 5.685323 5.9649186
8.997379 13.917359 5.0701327 11.3188305]
Mean: 10.480
Std: 5.313
After LayerNorm:
Values: [-1.3963605 0.6388257 1.3593478 1.6430035 -0.9024544 -0.84983045
-0.2790769 0.64693546 -1.0182422 0.15785426]
Mean: 0.000
Std: 1.000
✅ LayerNorm works on single samples
✅ Popular in Transformers and RNNs
✅ Independent of batch size
Comparing Normalization Methods#
import pandas as pd
comparison = pd.DataFrame({
'Method': ['BatchNorm', 'LayerNorm', 'GroupNorm', 'InstanceNorm'],
'Normalizes Over': ['Batch + Spatial', 'Features', 'Groups', 'Spatial per channel'],
'Best For': ['CNNs, large batches', 'RNNs, Transformers', 'Small batches', 'Style transfer'],
'Batch Dependent': ['Yes', 'No', 'No', 'No'],
'Typical Use': ['Vision', 'NLP', 'Vision (small batch)', 'GANs, Style'],
})
print("\n📊 Normalization Method Comparison:\n")
print(comparison.to_string(index=False))
print("\n\n🎯 Quick Guide:")
print(" • Large batch + CNN → BatchNorm")
print(" • Small batch + CNN → GroupNorm")
print(" • Sequences/RNN/Transformer → LayerNorm")
print(" • Single image inference → LayerNorm or GroupNorm")
📊 Normalization Method Comparison:
Method Normalizes Over Best For Batch Dependent Typical Use
BatchNorm Batch + Spatial CNNs, large batches Yes Vision
LayerNorm Features RNNs, Transformers No NLP
GroupNorm Groups Small batches No Vision (small batch)
InstanceNorm Spatial per channel Style transfer No GANs, Style
🎯 Quick Guide:
• Large batch + CNN → BatchNorm
• Small batch + CNN → GroupNorm
• Sequences/RNN/Transformer → LayerNorm
• Single image inference → LayerNorm or GroupNorm
3. Putting It All Together#
Building a complete network with activations and normalization:
import brainunit as u
class ModernCNN(brainstate.nn.Module):
"""CNN with modern activations and normalization."""
def __init__(self, num_classes=10):
super().__init__()
# Block 1: Conv + BatchNorm + GELU
self.conv1 = brainstate.nn.Conv2d((32, 32, 3), out_channels=64, kernel_size=(3, 3), padding='SAME')
self.bn1 = brainstate.nn.BatchNorm2d((32, 32, 64))
self.act1 = brainstate.nn.GELU()
self.pool1 = brainstate.nn.MaxPool2d(kernel_size=(2, 2), stride=(2, 2))
# Block 2
self.conv2 = brainstate.nn.Conv2d((16, 16, 64), out_channels=128, kernel_size=(3, 3), padding='SAME')
self.bn2 = brainstate.nn.BatchNorm2d((16, 16, 128))
self.act2 = brainstate.nn.GELU()
self.pool2 = brainstate.nn.MaxPool2d(kernel_size=(2, 2), stride=(2, 2), in_size=self.bn2.out_size)
# Classifier
self.fc1 = brainstate.nn.Linear((128 * 8 * 8,), (256,))
self.ln = brainstate.nn.LayerNorm((256,))
self.act3 = brainstate.nn.GELU()
self.dropout = brainstate.nn.Dropout(prob=0.5)
self.fc2 = brainstate.nn.Linear((256,), (num_classes,))
def update(self, x):
# Block 1
x = self.conv1(x)
x = self.bn1(x)
x = self.act1(x)
x = self.pool1(x)
# Block 2
x = self.conv2(x)
x = self.bn2(x)
x = self.act2(x)
x = self.pool2(x)
# Classifier
x = u.math.flatten(x, start_axis=1)
x = self.fc1(x)
x = self.ln(x)
x = self.act3(x)
x = self.dropout(x)
x = self.fc2(x)
return x
# Create and test
brainstate.random.seed(0)
model = ModernCNN(num_classes=10)
# Forward pass
x = brainstate.random.randn(4, 32, 32, 3) # 4 images
with brainstate.environ.context(fit=True) as env:
logits = model(x)
print("Modern CNN with GELU + BatchNorm + LayerNorm:")
print(model)
print()
print("Input:", x.shape)
print("Output:", logits.shape)
print()
print("Logits:", logits[0])
Modern CNN with GELU + BatchNorm + LayerNorm:
ModernCNN(
conv1=Conv2d(
in_size=(32, 32, 3),
out_size=(32, 32, 64),
channel_first=False,
channels_last=True,
in_channels=3,
out_channels=64,
stride=(1, 1),
kernel_size=(3, 3),
lhs_dilation=(1, 1),
rhs_dilation=(1, 1),
groups=1,
dimension_numbers=ConvDimensionNumbers(lhs_spec=(0, 3, 1, 2), rhs_spec=(3, 2, 0, 1), out_spec=(0, 3, 1, 2)),
padding=SAME,
kernel_shape=(3, 3, 3, 64),
w_mask=None,
w_initializer=XavierNormal(
scale=1.0,
mode='fan_avg',
in_axis=-2,
out_axis=-1,
distribution='truncated_normal',
rng=RandomState([1846506472 1430574090]),
unit=Unit(10.0^0)
),
b_initializer=None,
weight=ParamState(
value={
'weight': ShapedArray(float32[3,3,3,64])
}
)
),
bn1=BatchNorm2d(
in_size=(32, 32, 64),
out_size=(32, 32, 64),
affine=True,
bias_initializer=Constant(
value=0.0
),
scale_initializer=Constant(
value=1.0
),
dtype=<class 'numpy.float32'>,
track_running_stats=True,
momentum=Array(0.99, dtype=float32),
epsilon=Array(1.e-05, dtype=float32),
use_fast_variance=True,
feature_axes=(2,),
axis_name=None,
axis_index_groups=None,
running_mean=BatchState(
value=ShapedArray(float32[1,1,64])
),
running_var=BatchState(
value=ShapedArray(float32[1,1,64])
),
weight=NormalizationParamState(
value={
'bias': ShapedArray(float32[1,1,64]),
'scale': ShapedArray(float32[1,1,64])
}
)
),
act1=GELU(approximate=False),
pool1=MaxPool2d(
init_value=-inf,
computation=<function max at 0x000001C17F834220>,
pool_dim=2,
return_indices=False,
kernel_size=(2, 2),
stride=(2, 2),
padding=VALID,
channel_axis=-1
),
conv2=Conv2d(
in_size=(16, 16, 64),
out_size=(16, 16, 128),
channel_first=False,
channels_last=True,
in_channels=64,
out_channels=128,
stride=(1, 1),
kernel_size=(3, 3),
lhs_dilation=(1, 1),
rhs_dilation=(1, 1),
groups=1,
dimension_numbers=ConvDimensionNumbers(lhs_spec=(0, 3, 1, 2), rhs_spec=(3, 2, 0, 1), out_spec=(0, 3, 1, 2)),
padding=SAME,
kernel_shape=(3, 3, 64, 128),
w_mask=None,
w_initializer=XavierNormal(
scale=1.0,
mode='fan_avg',
in_axis=-2,
out_axis=-1,
distribution='truncated_normal',
rng=RandomState([1846506472 1430574090]),
unit=Unit(10.0^0)
),
b_initializer=None,
weight=ParamState(
value={
'weight': ShapedArray(float32[3,3,64,128])
}
)
),
bn2=BatchNorm2d(
in_size=(16, 16, 128),
out_size=(16, 16, 128),
affine=True,
bias_initializer=Constant(
value=0.0
),
scale_initializer=Constant(
value=1.0
),
dtype=<class 'numpy.float32'>,
track_running_stats=True,
momentum=Array(0.99, dtype=float32),
epsilon=Array(1.e-05, dtype=float32),
use_fast_variance=True,
feature_axes=(2,),
axis_name=None,
axis_index_groups=None,
running_mean=BatchState(
value=ShapedArray(float32[1,1,128])
),
running_var=BatchState(
value=ShapedArray(float32[1,1,128])
),
weight=NormalizationParamState(
value={
'bias': ShapedArray(float32[1,1,128]),
'scale': ShapedArray(float32[1,1,128])
}
)
),
act2=GELU(approximate=False),
pool2=MaxPool2d(
in_size=(16, 16, 128),
out_size=(8, 8, 128),
init_value=-inf,
computation=<function max at 0x000001C17F834220>,
pool_dim=2,
return_indices=False,
kernel_size=(2, 2),
stride=(2, 2),
padding=VALID,
channel_axis=-1
),
fc1=Linear(
in_size=(8192,),
out_size=(256,),
w_mask=None,
weight=ParamState(
value={
'bias': ShapedArray(float32[256]),
'weight': ShapedArray(float32[8192,256])
}
)
),
ln=LayerNorm(
in_size=(256,),
out_size=(256,),
feature_axes=(0,),
reduction_axes=(-1,),
axis_name=None,
axis_index_groups=None,
weight=NormalizationParamState(
value={
'bias': ShapedArray(float32[256]),
'scale': ShapedArray(float32[256])
}
),
epsilon=1e-06,
dtype=<class 'numpy.float32'>,
use_bias=True,
use_scale=True,
bias_init=ZeroInit(
unit=Unit(10.0^0)
),
scale_init=Constant(
value=1.0
),
use_fast_variance=True
),
act3=GELU(approximate=False),
dropout=Dropout(
prob=0.5,
broadcast_dims=()
),
fc2=Linear(
in_size=(256,),
out_size=(10,),
w_mask=None,
weight=ParamState(
value={
'bias': ShapedArray(float32[10]),
'weight': ShapedArray(float32[256,10])
}
)
)
)
Input: (4, 32, 32, 3)
Output: (4, 10)
Logits: [ 3.3256447 -1.429272 0.7167457 1.7075744 0.22491284 -1.362806
-0.27098486 -0.27673492 -1.0504798 -1.4831724 ]
Summary#
In this tutorial, you learned:
✅ Activation Functions
ReLU family (ReLU, Leaky ReLU, ELU)
Modern activations (GELU, SiLU)
Classic activations (Sigmoid, Tanh)
Softmax for classification
✅ Normalization Layers
BatchNorm for large-batch training
LayerNorm for sequences and transformers
GroupNorm for small-batch scenarios
✅ Practical Guidelines
When to use each activation
When to use each normalization
How to combine them effectively
Quick Reference Card#
Task |
Activation |
Normalization |
|---|---|---|
CNN (large batch) |
ReLU/GELU |
BatchNorm |
CNN (small batch) |
ReLU/GELU |
GroupNorm |
Transformer/NLP |
GELU |
LayerNorm |
RNN/LSTM |
Tanh (gates) |
LayerNorm |
Binary output |
Sigmoid |
- |
Multi-class output |
Softmax |
- |
Best Practices#
🎯 Use ReLU/GELU as default activations
📊 Add normalization after conv/linear layers
⚡ Order: Conv/Linear → Norm → Activation
🔍 Experiment with activation functions
📝 Use appropriate normalization for your batch size
Next Steps#
Continue with:
Recurrent Networks - Handle sequential data
Training - Optimize with gradient descent
Advanced Architectures - ResNets, Transformers