Delay Protocol#
Introduction#
Delays are fundamental in neural systems, arising from:
Axonal conduction delays: Signal propagation along axons takes time
Synaptic delays: Chemical transmission across synapses introduces latency
Network delays: Multi-step information processing creates temporal lags
BrainState provides three powerful APIs for handling delays:
brainstate.nn.Delay: General-purpose delay buffer for any databrainstate.nn.DelayAccess: Named accessor for specific delay entriesbrainstate.nn.StateWithDelay: Automatic delay tracking for module states
Learning Objectives#
By the end of this tutorial, you will:
✅ Understand the two delay buffer methods: rotation vs concatenation
✅ Use
Delayto create flexible delay buffers with multiple delay taps✅ Access delayed values using
DelayAccessand named entries✅ Leverage
StateWithDelayfor automatic state history tracking✅ Implement realistic neural models with synaptic and axonal delays
✅ Choose between step-based and time-based delay retrieval
✅ Use linear vs round interpolation for continuous-time delays
Setup#
import brainstate
import brainunit as u
import jax.numpy as jnp
import matplotlib.pyplot as plt
brainstate.environ.set(dt=0.1 * u.ms) # 0.1 ms time step
Part 1: Understanding brainstate.nn.Delay#
1.1 What is a Delay Buffer?#
A delay buffer stores a rolling history of values over time. Think of it as a time window looking into the past:
Time: t-3 t-2 t-1 t (now)
│ │ │ │
Data: [10] → [20] → [30] → [40]
↑ ↑ ↑ ↑
delay=3 delay=2 delay=1 delay=0
The Delay class maintains this history efficiently using two methods:
Rotation method (default): Uses a ring buffer with modulo indexing
Concatenation method: Shifts data by concatenating new values
1.2 Creating a Basic Delay#
Let’s create a simple delay buffer for a scalar signal:
# Create a delay buffer for a scalar value
# We need to specify the shape/dtype of data we'll store
target_data = jnp.array([0.0]) # Example: scalar in array form
# Create delay with 5ms maximum delay
delay_buffer = brainstate.nn.Delay(
target_info=target_data, # Shape/dtype template
time=5.0 * u.ms, # Maximum delay time
init=0.0, # Initial history value
delay_method='rotation' # Use ring buffer (default)
)
# Initialize the state
delay_buffer.init_state()
print(f"Maximum delay time: {delay_buffer.max_time}")
print(f"Maximum delay length (steps): {delay_buffer.max_length}")
print(f"History buffer shape: {delay_buffer.history.value.shape}")
Maximum delay time: 5.0 * msecond
Maximum delay length (steps): 51
History buffer shape: (51, 1)
1.3 Registering Delay Entries#
You can register multiple named entries for different delay times:
# Create delay buffer with multiple taps
delay_buffer = brainstate.nn.Delay(
target_info=jnp.array([0.0]),
time=10.0 * u.ms, # Support delays up to 10ms
init=0.0
)
# Register different delay times with names
delay_buffer.register_entry('immediate', 0.0 * u.ms) # No delay
delay_buffer.register_entry('short', 2.0 * u.ms) # 2ms delay
delay_buffer.register_entry('medium', 5.0 * u.ms) # 5ms delay
delay_buffer.register_entry('long', 10.0 * u.ms) # 10ms delay
delay_buffer.init_state()
print("Registered delay entries:")
for name, delay_info in delay_buffer._registered_entries.items():
print(f" {name}: {delay_info} steps")
Registered delay entries:
immediate: (Array(0, dtype=int32),) steps
short: (Array(20, dtype=int32),) steps
medium: (Array(50, dtype=int32),) steps
long: (Array(100, dtype=int32),) steps
1.4 Updating and Accessing Delayed Values#
Now let’s simulate a signal and access its delayed versions:
# Simulation parameters
duration = 50.0 * u.ms
dt = brainstate.environ.get_dt()
num_steps = int(duration / dt)
# Storage for visualization
times = []
current_values = []
delayed_short = []
delayed_medium = []
delayed_long = []
# Simulate a sinusoidal signal
for i in range(num_steps):
t = i * dt
brainstate.environ.set(i=i, t=t)
# Current signal: sin(2π * 50Hz * t)
current = jnp.sin(2 * jnp.pi * 50.0 * (t / u.second))
current_array = jnp.array([current])
# Update delay buffer with current value
delay_buffer.update(current_array)
# Retrieve delayed values
val_immediate = delay_buffer.at('immediate')[0]
val_short = delay_buffer.at('short')[0]
val_medium = delay_buffer.at('medium')[0]
val_long = delay_buffer.at('long')[0]
# Store for plotting
times.append(float(t / u.ms))
current_values.append(float(val_immediate))
delayed_short.append(float(val_short))
delayed_medium.append(float(val_medium))
delayed_long.append(float(val_long))
# Visualize
plt.figure(figsize=(12, 6))
plt.plot(times, current_values, label='Current (0ms delay)', linewidth=2)
plt.plot(times, delayed_short, label='Short (2ms delay)', alpha=0.7)
plt.plot(times, delayed_medium, label='Medium (5ms delay)', alpha=0.7)
plt.plot(times, delayed_long, label='Long (10ms delay)', alpha=0.7)
plt.xlabel('Time (ms)')
plt.ylabel('Signal Value')
plt.title('Delay Buffer: Multiple Delay Taps on 50Hz Sinusoid')
plt.legend()
plt.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print("✅ Delay buffer successfully stores and retrieves delayed values")
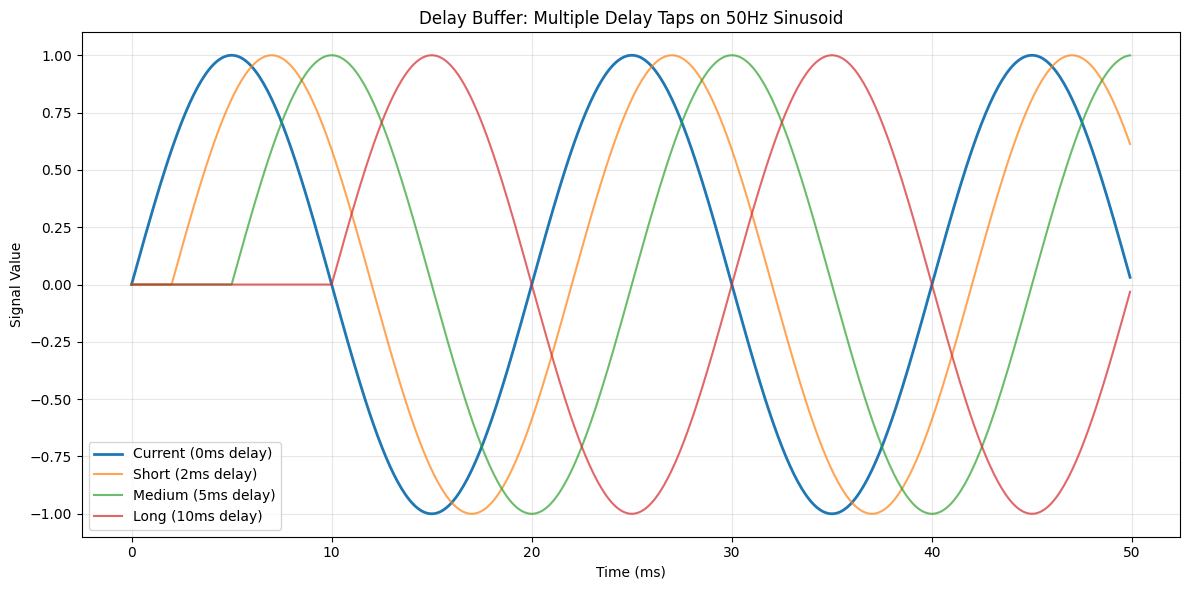
✅ Delay buffer successfully stores and retrieves delayed values
1.5 Rotation vs Concatenation Methods#
Rotation method (ring buffer):
More memory efficient
Uses modulo indexing:
index = (current_step - delay_step) % max_lengthDefault and recommended for most cases
Concatenation method:
Shifts entire buffer on each update
Easier to understand conceptually
Can be slower for large buffers
Let’s compare both:
# Create two delay buffers with different methods
delay_rotation = brainstate.nn.Delay(
target_info=jnp.array([0.0]),
time=5.0 * u.ms,
delay_method='rotation'
)
delay_rotation.register_entry('test', 3.0 * u.ms)
delay_rotation.init_state()
delay_concat = brainstate.nn.Delay(
target_info=jnp.array([0.0]),
time=5.0 * u.ms,
delay_method='concat'
)
delay_concat.register_entry('test', 3.0 * u.ms)
delay_concat.init_state()
# Simulate 10 steps
print("Comparing rotation vs concatenation methods:\n")
for i in range(10):
brainstate.environ.set(i=i)
# Update both with same value
value = jnp.array([float(i)])
delay_rotation.update(value)
delay_concat.update(value)
# Retrieve delayed values
val_rotation = delay_rotation.at('test')[0]
val_concat = delay_concat.at('test')[0]
print(f"Step {i}: Rotation={val_rotation:.1f}, Concat={val_concat:.1f}, Match={jnp.allclose(val_rotation, val_concat)}")
print("\n✅ Both methods produce identical results")
Comparing rotation vs concatenation methods:
Step 0: Rotation=0.0, Concat=0.0, Match=True
Step 1: Rotation=0.0, Concat=0.0, Match=True
Step 2: Rotation=0.0, Concat=0.0, Match=True
Step 3: Rotation=0.0, Concat=0.0, Match=True
Step 4: Rotation=0.0, Concat=0.0, Match=True
Step 5: Rotation=0.0, Concat=0.0, Match=True
Step 6: Rotation=0.0, Concat=0.0, Match=True
Step 7: Rotation=0.0, Concat=0.0, Match=True
Step 8: Rotation=0.0, Concat=0.0, Match=True
Step 9: Rotation=0.0, Concat=0.0, Match=True
✅ Both methods produce identical results
Part 2: Time-based vs Step-based Retrieval#
2.1 Step-based Retrieval#
When you know the exact delay in integer time steps, use retrieve_at_step():
delay_buffer = brainstate.nn.Delay(
target_info=jnp.array([0.0]),
time=10.0 * u.ms,
)
delay_buffer.init_state()
# Populate buffer
for i in range(20):
brainstate.environ.set(i=i)
delay_buffer.update(jnp.array([float(i * 10)]))
# Retrieve by step (integer delay)
brainstate.environ.set(i=19) # At step 19
current = delay_buffer.retrieve_at_step(0) # 0 steps back
delayed_5 = delay_buffer.retrieve_at_step(5) # 5 steps back
delayed_10 = delay_buffer.retrieve_at_step(10) # 10 steps back
print("Step-based retrieval at step 19:")
print(f" 0 steps back (current): {current[0]:.1f} (expected: {19*10})")
print(f" 5 steps back: {delayed_5[0]:.1f} (expected: {(19-5)*10})")
print(f" 10 steps back: {delayed_10[0]:.1f} (expected: {(19-10)*10})")
Step-based retrieval at step 19:
0 steps back (current): 190.0 (expected: 190)
5 steps back: 140.0 (expected: 140)
10 steps back: 90.0 (expected: 90)
2.2 Time-based Retrieval#
When delays are specified in continuous time, use retrieve_at_time(). This supports interpolation:
# Create delay with linear interpolation
delay_linear = brainstate.nn.Delay(
target_info=jnp.array([0.0]),
time=5.0 * u.ms,
interp_method='linear_interp' # Linear interpolation
)
delay_linear.init_state()
# Create delay with round interpolation
delay_round = brainstate.nn.Delay(
target_info=jnp.array([0.0]),
time=5.0 * u.ms,
interp_method='round' # Round to nearest step
)
delay_round.init_state()
# Populate both buffers
for i in range(100):
t = i * brainstate.environ.get_dt()
brainstate.environ.set(i=i, t=t)
value = jnp.array([float(i)])
delay_linear.update(value)
delay_round.update(value)
# Retrieve at non-integer delay times
t_current = 99 * brainstate.environ.get_dt()
brainstate.environ.set(i=99, t=t_current)
delay_time = 2.5 * u.ms # 2.5ms = 25 steps (non-integer at 0.1ms resolution)
target_time = t_current - delay_time
val_linear = delay_linear.retrieve_at_time(target_time)[0]
val_round = delay_round.retrieve_at_time(target_time)[0]
print(f"Time-based retrieval at t={float(t_current / u.ms):.1f}ms, delay={float(delay_time / u.ms)}ms:")
print(f" Linear interpolation: {val_linear:.2f} (between steps 74 and 75)")
print(f" Round interpolation: {val_round:.2f} (rounds to nearest step)")
print(f" Expected exact value: {99 - 25} (25 steps back from step 99)")
Time-based retrieval at t=9.9ms, delay=2.5ms:
Linear interpolation: 74.00 (between steps 74 and 75)
Round interpolation: 74.00 (rounds to nearest step)
Expected exact value: 74 (25 steps back from step 99)
2.3 Interpolation Comparison#
Let’s visualize the difference between linear and round interpolation:
# Create delays with different interpolation
delay_linear = brainstate.nn.Delay(jnp.array([0.0]), time=10.0 * u.ms, interp_method='linear_interp')
delay_round = brainstate.nn.Delay(jnp.array([0.0]), time=10.0 * u.ms, interp_method='round')
delay_linear.init_state()
delay_round.init_state()
# Populate with ramp signal
for i in range(200):
t = i * brainstate.environ.get_dt()
brainstate.environ.set(i=i, t=t)
value = jnp.array([float(i)])
delay_linear.update(value)
delay_round.update(value)
# Test various delay times (non-integer steps)
t_now = 199 * brainstate.environ.get_dt()
brainstate.environ.set(i=199, t=t_now)
delay_times_ms = jnp.linspace(0.0, 10.0, 101) # 0 to 10ms
linear_vals = []
round_vals = []
for delay_ms in delay_times_ms:
delay_time = delay_ms * u.ms
target_time = t_now - delay_time
val_linear = delay_linear.retrieve_at_time(target_time)[0]
val_round = delay_round.retrieve_at_time(target_time)[0]
linear_vals.append(float(val_linear))
round_vals.append(float(val_round))
plt.figure(figsize=(12, 5))
plt.plot(delay_times_ms, linear_vals, label='Linear Interpolation', linewidth=2)
plt.plot(delay_times_ms, round_vals, label='Round Interpolation', linewidth=2, alpha=0.7, linestyle='--')
plt.xlabel('Delay Time (ms)')
plt.ylabel('Retrieved Value')
plt.title('Linear vs Round Interpolation in Time-based Delay Retrieval')
plt.legend()
plt.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print("✅ Linear interpolation provides smooth continuous values")
print("✅ Round interpolation snaps to nearest discrete time step")
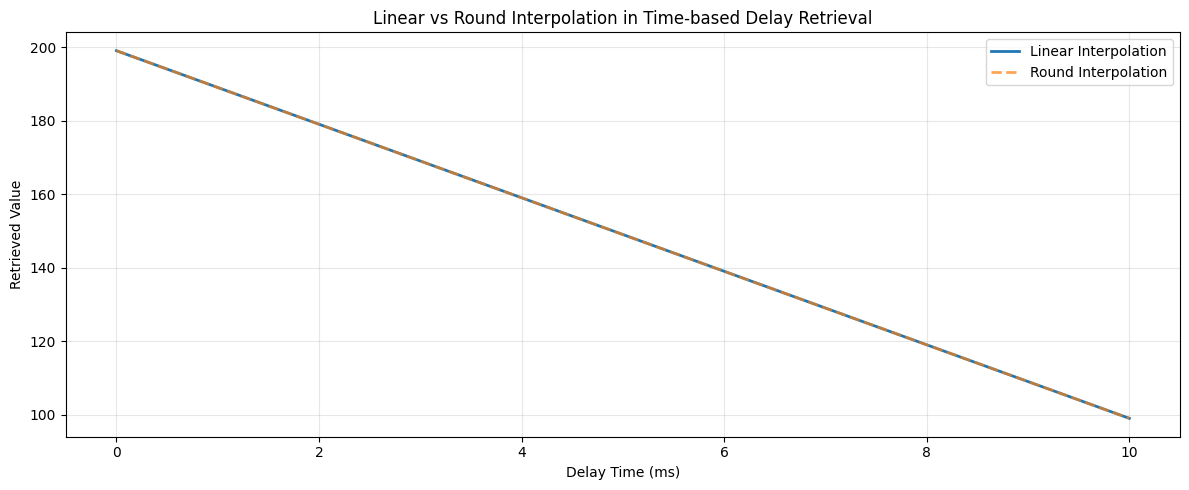
✅ Linear interpolation provides smooth continuous values
✅ Round interpolation snaps to nearest discrete time step
Part 3: brainstate.nn.DelayAccess#
3.1 What is DelayAccess?#
DelayAccess creates a reusable accessor for a specific delay entry. It’s useful when:
You need to pass delay accessors to other modules
You want to encapsulate delay configuration
Building modular neural network components
3.2 Creating and Using DelayAccess#
# Create a delay buffer
delay_buffer = brainstate.nn.Delay(
target_info=jnp.array([0.0, 0.0, 0.0]), # 3D vector
time=10.0 * u.ms,
)
delay_buffer.init_state()
# Create DelayAccess objects for different delays
# Method 1: Using .access() method
accessor_2ms = delay_buffer.access('entry_2ms', 2.0 * u.ms)
accessor_5ms = delay_buffer.access('entry_5ms', 5.0 * u.ms)
# Simulate signal
for i in range(200):
brainstate.environ.set(i=i)
# Update with [i, i*2, i*3]
value = jnp.array([float(i), float(i*2), float(i*3)])
delay_buffer.update(value)
# Access delayed values through DelayAccess objects
delayed_2ms = accessor_2ms.update() # Call update() to retrieve
delayed_5ms = accessor_5ms.update()
print("DelayAccess retrieval at step 199:")
print(f" 2ms delay (20 steps): {delayed_2ms}")
print(f" 5ms delay (50 steps): {delayed_5ms}")
print(f" Expected 2ms: [{199-20}, {(199-20)*2}, {(199-20)*3}]")
print(f" Expected 5ms: [{199-50}, {(199-50)*2}, {(199-50)*3}]")
DelayAccess retrieval at step 199:
2ms delay (20 steps): [179. 358. 537.]
5ms delay (50 steps): [149. 298. 447.]
Expected 2ms: [179, 358, 537]
Expected 5ms: [149, 298, 447]
3.3 Using DelayAccess in Modules#
DelayAccess is particularly useful when building modular components:
class DelayedConnection(brainstate.nn.Module):
"""A module that applies delayed weighted connection."""
def __init__(self, size, weight, delay_time):
super().__init__()
self.weight = weight
# Create delay buffer and accessor
self.delay_buffer = brainstate.nn.Delay(
target_info=jnp.zeros(size),
time=delay_time * 2, # Buffer size
)
self.delay_access = self.delay_buffer.access('conn', delay_time)
def update(self, current_input):
# Store current input
self.delay_buffer.update(current_input)
# Get delayed input
delayed_input = self.delay_access.update()
# Apply weight to delayed input
return self.weight * delayed_input
# Create delayed connection
conn = DelayedConnection(size=5, weight=0.5, delay_time=3.0 * u.ms)
conn.delay_buffer.init_state()
# Simulate
print("Testing DelayedConnection module:\n")
for i in range(50):
brainstate.environ.set(i=i)
# Input: [i, i, i, i, i]
input_signal = jnp.ones(5) * i
output = conn.update(input_signal)
if i % 10 == 0:
print(f"Step {i:2d}: Input={float(input_signal[0]):5.1f}, Output={float(output[0]):5.1f}")
print("\n✅ DelayAccess enables modular delay handling in custom modules")
Testing DelayedConnection module:
Step 0: Input= 0.0, Output= 0.0
Step 10: Input= 10.0, Output= 0.0
Step 20: Input= 20.0, Output= 0.0
Step 30: Input= 30.0, Output= 0.0
Step 40: Input= 40.0, Output= 5.0
✅ DelayAccess enables modular delay handling in custom modules
Part 4: brainstate.nn.StateWithDelay#
4.1 What is StateWithDelay?#
StateWithDelay is a specialized delay that automatically tracks a State variable in a module:
Automatically bound to a module’s state (e.g., membrane potential
V)Updates history buffer after each simulation step
Commonly created via
prefetch_delay()helperIdeal for delayed feedback and recurrent connections
4.2 Using StateWithDelay via prefetch_delay()#
The easiest way to use StateWithDelay is through the Dynamics prefetch_delay() method:
class LIFWithDelayedFeedback(brainstate.nn.Dynamics):
"""LIF neuron with delayed self-feedback."""
def __init__(self, size, feedback_delay=5.0 * u.ms, feedback_strength=0.3):
super().__init__(in_size=size)
# Neuron parameters
self.tau = 10.0 * u.ms
self.V_rest = -65.0 * u.mV
self.V_th = -50.0 * u.mV
self.V_reset = -65.0 * u.mV
self.R = 1.0 * u.ohm
self.feedback_strength = feedback_strength
# States
self.V = brainstate.State(jnp.ones(size) * self.V_rest)
self.spike = brainstate.State(jnp.zeros(size, dtype=bool))
# Create StateWithDelay for V using prefetch_delay()
# This automatically creates a StateWithDelay and registers it
self.V_delayed = self.prefetch_delay('V', feedback_delay)
def update(self, I):
# Get delayed voltage for feedback
V_delayed = self.V_delayed() # Call to retrieve delayed value
# Add delayed feedback to input current
feedback_current = (V_delayed - self.V_rest) * self.feedback_strength / self.R
I_total = I + feedback_current
# Update voltage (exponential Euler)
dt = brainstate.environ.get_dt()
alpha = jnp.exp(-dt / self.tau)
V_inf = self.V_rest + I_total * self.R
self.V.value = self.V.value * alpha + V_inf * (1 - alpha)
# Spike detection and reset
self.spike.value = self.V.value >= self.V_th
self.V.value = u.math.where(self.spike.value, self.V_reset, self.V.value)
return self.spike.value
# Create neuron with delayed feedback
neuron = LIFWithDelayedFeedback(size=1, feedback_delay=3.0 * u.ms, feedback_strength=0.4)
brainstate.nn.init_all_states(neuron)
# Simulate
duration = 100.0 * u.ms
num_steps = int(duration / brainstate.environ.get_dt())
times = []
voltages = []
spikes = []
for i in range(num_steps):
t = i * brainstate.environ.get_dt()
brainstate.environ.set(i=i, t=t)
# Constant input current
I_input = 1.5 * u.nA * jnp.ones(1)
spike_output = neuron.update(I_input)
times.append(float(t / u.ms))
voltages.append(float(neuron.V.value[0] / u.mV))
spikes.append(float(spike_output[0]))
# Visualize
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(12, 6), sharex=True)
# Voltage trace
ax1.plot(times, voltages, linewidth=1.5)
ax1.axhline(y=-50.0, color='r', linestyle='--', alpha=0.5, label='Threshold')
ax1.set_ylabel('Membrane Potential (mV)')
ax1.set_title('LIF Neuron with Delayed Self-Feedback (3ms delay)')
ax1.legend()
ax1.grid(True, alpha=0.3)
# Spike raster
spike_times = [times[i] for i in range(len(spikes)) if spikes[i] > 0.5]
ax2.eventplot([spike_times], lineoffsets=0.5, linelengths=0.8, colors='red')
ax2.set_ylabel('Spikes')
ax2.set_xlabel('Time (ms)')
ax2.set_ylim([0, 1])
ax2.set_yticks([])
ax2.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print("✅ StateWithDelay automatically tracks module states for delayed feedback")
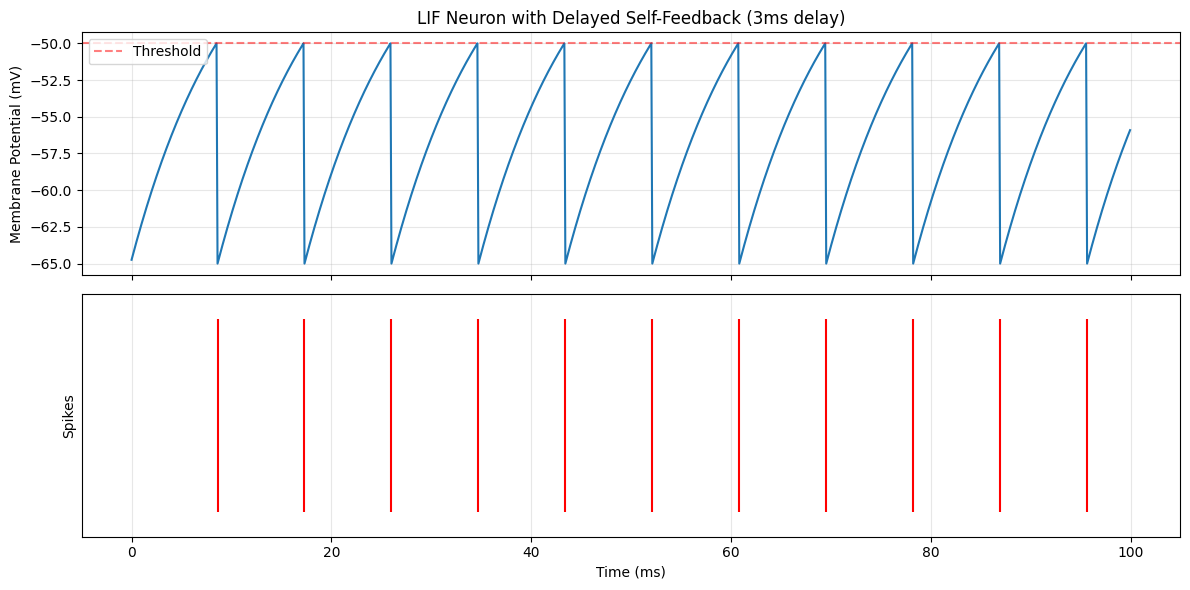
✅ StateWithDelay automatically tracks module states for delayed feedback
4.3 Direct StateWithDelay Creation#
You can also create StateWithDelay explicitly (advanced usage):
class SimpleNeuron(brainstate.nn.Dynamics):
"""Simple neuron for demonstration."""
def __init__(self, size):
super().__init__(in_size=size)
self.V = brainstate.State(jnp.zeros(size))
def update(self, x):
self.V.value = self.V.value * 0.9 + x
return self.V.value
# Create neuron
neuron = SimpleNeuron(size=3)
neuron.init_state()
# Manually create StateWithDelay for neuron.V
state_delay = brainstate.nn.StateWithDelay(
target=neuron, # The module owning the state
item='V', # Name of the state attribute
delay_method='rotation'
)
# Register a delay time
state_delay.register_entry('V_5ms', 5.0 * u.ms)
# Initialize
state_delay.init_state()
# Simulate
print("Manual StateWithDelay creation:\n")
for i in range(100):
brainstate.environ.set(i=i)
# Update neuron
neuron.update(jnp.array([1.0, 2.0, 3.0]) * (i / 10.0))
# Update delay buffer (must be done manually in this case)
state_delay.update()
if i % 20 == 0:
current_V = neuron.V.value
delayed_V = state_delay.at('V_5ms')
print(f"Step {i:3d}: Current V={current_V}, Delayed V={delayed_V}")
print("\n✅ StateWithDelay can be created explicitly for fine-grained control")
Manual StateWithDelay creation:
Step 0: Current V=[0. 0. 0.], Delayed V=[0. 0. 0.]
Step 20: Current V=[12.094189 24.188377 36.282566], Delayed V=[0. 0. 0.]
Step 40: Current V=[31.133022 62.266045 93.39906 ], Delayed V=[0. 0. 0.]
Step 60: Current V=[ 51.016167 102.03233 153.0485 ], Delayed V=[ 4.1381054 8.276211 12.414316 ]
Step 80: Current V=[ 71.00195 142.0039 213.00584], Delayed V=[21.381517 42.763035 64.14455 ]
✅ StateWithDelay can be created explicitly for fine-grained control
Part 5: Practical Example - Synaptic Transmission with Delays#
Let’s build a realistic synapse model with axonal and dendritic delays:
5.1 Delayed Synaptic Connection#
class SimpleLIF(brainstate.nn.Dynamics):
"""Simple LIF neuron."""
def __init__(self, size, tau=10.0 * u.ms, V_rest=-65.0 * u.mV,
V_th=-50.0 * u.mV, V_reset=-65.0 * u.mV, R=1.0 * u.ohm):
super().__init__(in_size=size)
self.tau = tau
self.V_rest = V_rest
self.V_th = V_th
self.V_reset = V_reset
self.R = R
self.V = brainstate.State(jnp.ones(size) * V_rest)
self.spike = brainstate.State(jnp.zeros(size, dtype=bool))
def update(self, I):
dt = brainstate.environ.get_dt()
alpha = jnp.exp(-dt / self.tau)
V_inf = self.V_rest + I * self.R
self.V.value = self.V.value * alpha + V_inf * (1 - alpha)
self.spike.value = self.V.value >= self.V_th
self.V.value = u.math.where(self.spike.value, self.V_reset, self.V.value)
return self.spike.value
class DelayedSynapse(brainstate.nn.Dynamics):
"""Synapse with conduction delay."""
def __init__(self, pre_size, post_size, weight_matrix,
axonal_delay=2.0 * u.ms, tau_syn=5.0 * u.ms):
super().__init__(in_size=pre_size)
self.weight = weight_matrix
self.tau_syn = tau_syn
# Synaptic current state
self.I_syn = brainstate.State(jnp.zeros(post_size) * u.mA)
# Create delay buffer for presynaptic spikes
self.spike_delay = brainstate.nn.Delay(
target_info=jnp.zeros(pre_size, dtype=bool),
time=axonal_delay * 2,
init=False
)
self.spike_delay.register_entry('axonal', axonal_delay)
def update(self, pre_spike):
# Store presynaptic spikes
self.spike_delay.update(pre_spike)
# Retrieve delayed spikes
delayed_spike = self.spike_delay.at('axonal')
# Synaptic current injection
I_input = self.weight @ delayed_spike.astype(jnp.float32)
# Synaptic current decay
dt = brainstate.environ.get_dt()
alpha = jnp.exp(-dt / self.tau_syn)
self.I_syn.value = self.I_syn.value * alpha + I_input
return self.I_syn.value
# Create network: pre -> synapse -> post
pre_neuron = SimpleLIF(size=1)
post_neuron = SimpleLIF(size=1)
# Synaptic weight
weight = jnp.array([[2.0]]) * u.mA # Strong connection
synapse = DelayedSynapse(
pre_size=1,
post_size=1,
weight_matrix=weight,
axonal_delay=5.0 * u.ms, # 5ms axonal delay
tau_syn=3.0 * u.ms
)
# Initialize
pre_neuron.init_state()
post_neuron.init_state()
synapse.spike_delay.init_state()
# Simulate
duration = 100.0 * u.ms
num_steps = int(duration / brainstate.environ.get_dt())
times = []
pre_voltages = []
post_voltages = []
syn_currents = []
pre_spikes = []
post_spikes = []
for i in range(num_steps):
t = i * brainstate.environ.get_dt()
brainstate.environ.set(i=i, t=t)
# Strong input to presynaptic neuron
I_pre = 20. * u.mA * jnp.ones(1)
# Update presynaptic neuron
pre_spike = pre_neuron.update(I_pre)
# Update synapse with delayed transmission
I_syn = synapse.update(pre_spike)
# Update postsynaptic neuron
post_spike = post_neuron.update(I_syn)
# Record
times.append(float(t / u.ms))
pre_voltages.append(float(pre_neuron.V.value[0] / u.mV))
post_voltages.append(float(post_neuron.V.value[0] / u.mV))
syn_currents.append(float(I_syn[0] / u.nA))
pre_spikes.append(float(pre_spike[0]))
post_spikes.append(float(post_spike[0]))
# Visualize
fig, axes = plt.subplots(4, 1, figsize=(14, 10), sharex=True)
# Presynaptic voltage
axes[0].plot(times, pre_voltages, 'b', linewidth=1.5)
axes[0].axhline(y=-50.0, color='r', linestyle='--', alpha=0.5)
axes[0].set_ylabel('Pre V (mV)')
axes[0].set_title('Synaptic Transmission with 5ms Axonal Delay')
axes[0].grid(True, alpha=0.3)
# Presynaptic spikes
pre_spike_times = [times[i] for i in range(len(pre_spikes)) if pre_spikes[i] > 0.5]
axes[1].eventplot([pre_spike_times], lineoffsets=0.5, linelengths=0.8, colors='blue')
axes[1].set_ylabel('Pre Spikes')
axes[1].set_ylim([0, 1])
axes[1].set_yticks([])
axes[1].grid(True, alpha=0.3)
# Synaptic current
axes[2].plot(times, syn_currents, 'g', linewidth=1.5)
axes[2].set_ylabel('Syn Current (nA)')
axes[2].grid(True, alpha=0.3)
# Postsynaptic voltage
axes[3].plot(times, post_voltages, 'r', linewidth=1.5)
axes[3].axhline(y=-50.0, color='r', linestyle='--', alpha=0.5)
axes[3].set_ylabel('Post V (mV)')
axes[3].set_xlabel('Time (ms)')
axes[3].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print("\n✅ Delayed synaptic transmission: presynaptic spikes appear at postsynaptic neuron after 5ms delay")
if len(pre_spike_times) > 0:
print(f" First pre spike: ~{pre_spike_times[0]:.1f}ms")
print(f" First syn current rise: ~{pre_spike_times[0] + 5.0:.1f}ms (5ms delay)")
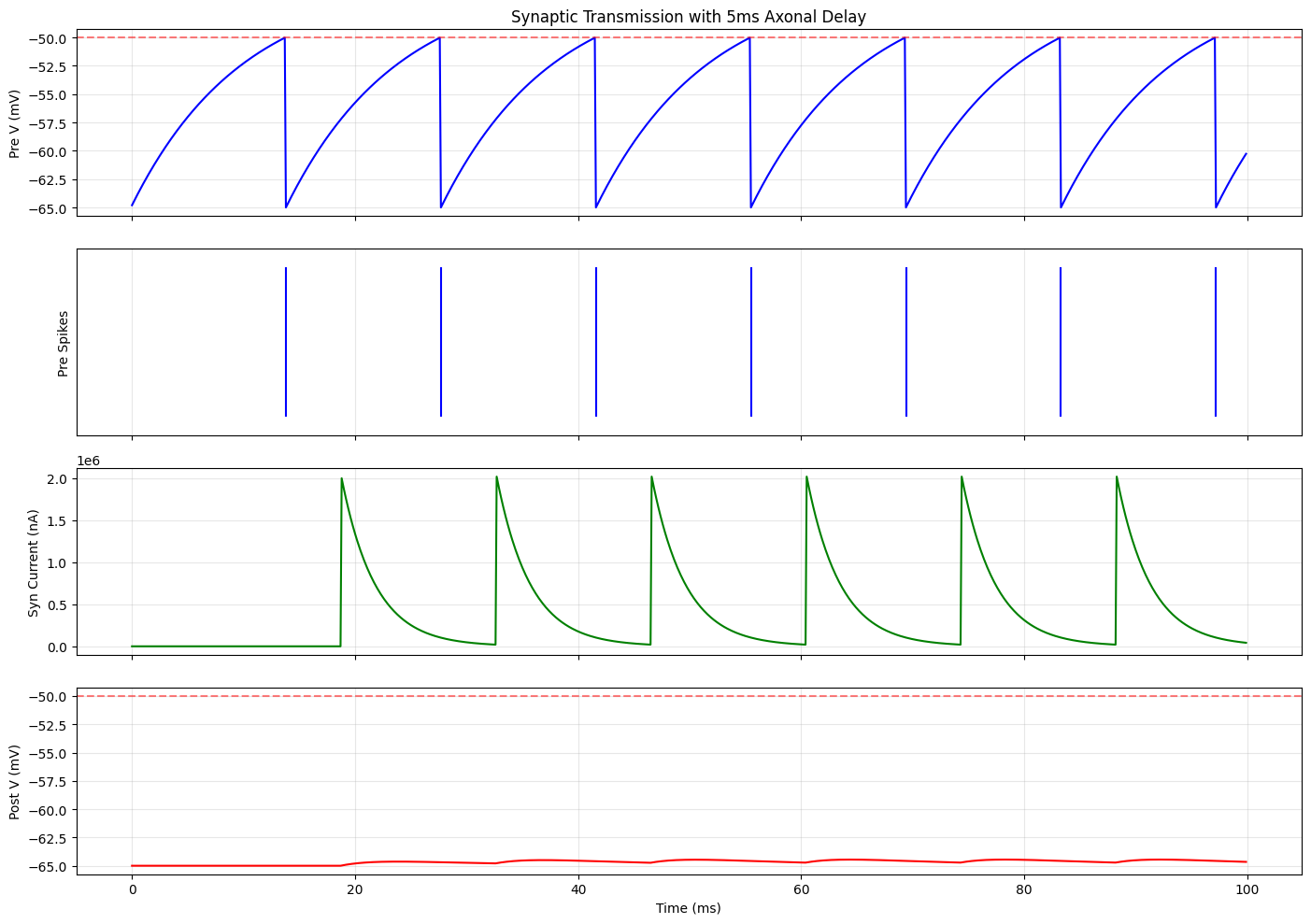
✅ Delayed synaptic transmission: presynaptic spikes appear at postsynaptic neuron after 5ms delay
First pre spike: ~13.8ms
First syn current rise: ~18.8ms (5ms delay)
Part 6: Advanced - Heterogeneous Delays#
6.1 Vector Delays#
BrainState supports heterogeneous delays where each element can have a different delay time:
# Create delay buffer for 3 neurons
delay_buffer = brainstate.nn.Delay(
target_info=jnp.zeros(3),
time=10.0 * u.ms,
)
# Register heterogeneous delays: different delay for each neuron
# Delays: [2ms, 5ms, 8ms]
delay_times = jnp.array([2.0, 5.0, 8.0]) * u.ms
neuron_indices = jnp.array([0, 1, 2]) # Which neuron
delay_buffer.register_entry('heterogeneous', delay_times, neuron_indices)
delay_buffer.init_state()
# Simulate
for i in range(200):
brainstate.environ.set(i=i)
# Update with [i, i*10, i*100]
values = jnp.array([float(i), float(i*10), float(i*100)])
delay_buffer.update(values)
# Retrieve heterogeneous delays
delayed_values = delay_buffer.at('heterogeneous')
expected_delays_steps = jnp.array([20, 50, 80]) # in steps (0.1ms each)
expected_values = jnp.array([
199 - 20,
(199 - 50) * 10,
(199 - 80) * 100
])
print("Heterogeneous delays at step 199:")
print(f" Delays: [2ms, 5ms, 8ms] = {expected_delays_steps} steps")
print(f" Retrieved values: {delayed_values}")
print(f" Expected values: {expected_values}")
print(f" Match: {jnp.allclose(delayed_values, expected_values)}")
print("\n✅ Vector delays enable different delay times for each element")
Heterogeneous delays at step 199:
Delays: [2ms, 5ms, 8ms] = [20 50 80] steps
Retrieved values: [ 179. 1490. 11900.]
Expected values: [ 179 1490 11900]
Match: True
✅ Vector delays enable different delay times for each element
Summary#
Key Concepts#
brainstate.nn.Delay: General-purpose delay bufferStores rolling history of values
Supports rotation (ring buffer) or concatenation methods
Multiple named delay entries via
register_entry()Step-based (
retrieve_at_step) or time-based (retrieve_at_time) retrievalLinear or round interpolation for continuous-time queries
brainstate.nn.DelayAccess: Named accessor for delay entriesCreated via
delay.access(entry, delay_time)Encapsulates delay configuration
Useful for modular design
Call
.update()to retrieve delayed value
brainstate.nn.StateWithDelay: Automatic state trackingBound to a module’s
StatevariableCreated via
prefetch_delay(state_name, delay_time)Automatically updates after each step
Ideal for delayed feedback and recurrent connections
Call as function
()to retrieve delayed state
API Comparison Table#
Feature |
|
|
|
|---|---|---|---|
Use Case |
General data buffering |
Named accessors |
Module state tracking |
Creation |
Manual instantiation |
Via |
Via |
Updates |
Manual |
Inherits from Delay |
Automatic after step |
Retrieval |
|
|
Call as function |
Multiple delays |
✅ Multiple entries |
✅ One per accessor |
✅ Multiple registrations |
Interpolation |
✅ Linear or round |
✅ Via underlying Delay |
✅ Via underlying Delay |
Best Practices#
Choose the right tool:
Use
Delayfor general data buffering (synaptic inputs, external signals)Use
DelayAccesswhen passing delay accessors to other modulesUse
StateWithDelay(viaprefetch_delay()) for module state feedback
Delay method selection:
Default to
rotation(ring buffer) for efficiencyUse
concatonly if you need sequential buffer structure
Interpolation:
Use
linear_interpfor smooth continuous-time delaysUse
roundfor discrete time steps
Buffer sizing:
Set
timeparameter larger than maximum expected delayBuffer size =
ceil(max_delay / dt) + 1steps
Initialization:
Always call
.init_state()before simulationProvide meaningful
initvalues for t < 0 history
Common Patterns#
Pattern 1: Delayed synaptic connection
# In synapse __init__:
self.spike_delay = brainstate.nn.Delay(jnp.zeros(pre_size), time=delay_time)
self.spike_delay.register_entry('syn', delay_time)
# In synapse update:
self.spike_delay.update(pre_spike)
delayed_spike = self.spike_delay.at('syn')
Pattern 2: Delayed feedback
# In neuron __init__:
self.V_delayed = self.prefetch_delay('V', feedback_delay)
# In neuron update:
V_past = self.V_delayed()
feedback = compute_feedback(V_past)
Pattern 3: Multiple delay taps
delay = brainstate.nn.Delay(data, time=max_delay)
delay.register_entry('short', 2.0 * u.ms)
delay.register_entry('medium', 5.0 * u.ms)
delay.register_entry('long', 10.0 * u.ms)
Exercise#
Challenge: Implement a network of 3 LIF neurons with the following connections:
Neuron 0 → Neuron 1 (2ms delay, weight=1.0)
Neuron 1 → Neuron 2 (5ms delay, weight=1.5)
Neuron 2 → Neuron 0 (3ms delay, weight=-0.5, inhibitory)
Use brainstate.nn.Delay for the synaptic connections and simulate for 200ms.
Hints:
Create 3
SimpleLIFneuronsCreate 3
DelayedSynapseobjects for the connectionsDrive Neuron 0 with external input
Plot voltage traces of all 3 neurons
Observe the sequential activation with delays
What’s Next?#
Tutorial 7: Collective Operations - Learn about communication patterns in neural populations
Advanced Delays - Explore plastic delays and state-dependent delays
Network Architecture - Build large-scale networks with distributed delays
Congratulations! You now understand BrainState’s powerful delay mechanisms for modeling realistic neural dynamics. 🎉