Dynamics Protocol#
This tutorial systematically introduces the Dynamics programming protocol in BrainState, which defines the standard interface for implementing temporal evolution of neural systems.
Learning Objectives#
You will learn:
🧠 What is Dynamics - The design philosophy and element-wise computation principle
⚙️ Basic structure - How to implement the
update()function🔄 Before/After updates - Flexible control flow mechanisms
📐 Size inference - Input/output dimension management
⏱️ Delay support - Temporal dynamics with delay mechanisms
🌍 Ecosystem integration - Usage across brainpy.state, brainmass, and braincell
Why Dynamics Protocol?#
The Dynamics protocol provides:
🎯 Unified interface - Consistent API across the ecosystem
🧩 Composability - Easy integration with other modules
🔬 Biological fidelity - Element-wise dynamics matching neural behavior
🚀 Performance - Efficient JAX compilation and state management
import brainunit as u
import jax.numpy as jnp
import matplotlib.pyplot as plt
import brainstate
# Set simulation time step
brainstate.environ.set(dt=0.1 * u.ms)
Part 1: What is Dynamics?#
Core Concept#
Dynamics is a module that defines how state variables evolve over time in neural or other dynamical systems. All Dynamics models follow the element-wise computation principle: state updates only affect local variables and do not include cross-unit interactions.
Element-Wise Principle#
Consider the Leaky Integrate-and-Fire (LIF) neuron model:
Each neuron’s voltage \(V\) evolves independently based only on its own state and input current \(I\). This is element-wise dynamics.
What Dynamics is NOT#
Dynamics does NOT include:
Synaptic connections between neurons
Network connectivity
Inter-neuron interactions
These are handled by separate modules like Linear, Sparse, or Convolution connection operators.
Architecture Overview#
Input (External Drive)
↓
[Connection Modules] ← (Linear, Conv, Sparse)
↓
[Dynamics Modules] ← (LIF, HH, Izhikevich)
↓
Output (Spikes/Voltages)
See BrainScale documentation for visual reference.

Example: Simple Exponential Decay#
Let’s implement a simple dynamics model that demonstrates the element-wise principle.
class ExponentialDecay(brainstate.nn.Dynamics):
"""Simple exponential decay dynamics: τ dv/dt = -v"""
def __init__(self, size, tau=10.0 * u.ms):
super().__init__(in_size=size)
# State variable
self.v = brainstate.State(jnp.zeros(size))
# Parameter (constant, not a State)
self.tau = tau
def update(self, inp):
"""Element-wise update: each element evolves independently"""
# Exponential Euler integration
dt = brainstate.environ.get_dt()
alpha = jnp.exp(-dt / self.tau)
# Update state (element-wise operation)
self.v.value = self.v.value * alpha + inp
# Return current state
return self.v.value
# Create dynamics module with 5 independent elements
dynamics = ExponentialDecay(size=(5,), tau=5.0 * u.ms)
print(f"Dynamics module: {dynamics}")
print(f"Input size: {dynamics.in_size}")
print(f"Output size: {dynamics.out_size}")
print(f"Variable shape (varshape): {dynamics.varshape}")
print(f"\nInitial state: {dynamics.v.value}")
# Apply input to all 5 elements
inp = jnp.array([1.0, 0.5, 0.0, -0.5, -1.0])
output = dynamics(inp)
print(f"\nAfter one step with input {inp}:")
print(f"Output: {output}")
Dynamics module: ExponentialDecay(
in_size=(5,),
out_size=(5,),
v=State(
value=ShapedArray(float32[5])
),
tau=5. * msecond
)
Input size: (5,)
Output size: (5,)
Variable shape (varshape): (5,)
Initial state: [0. 0. 0. 0. 0.]
After one step with input [ 1. 0.5 0. -0.5 -1. ]:
Output: [ 1. 0.5 0. -0.5 -1. ]
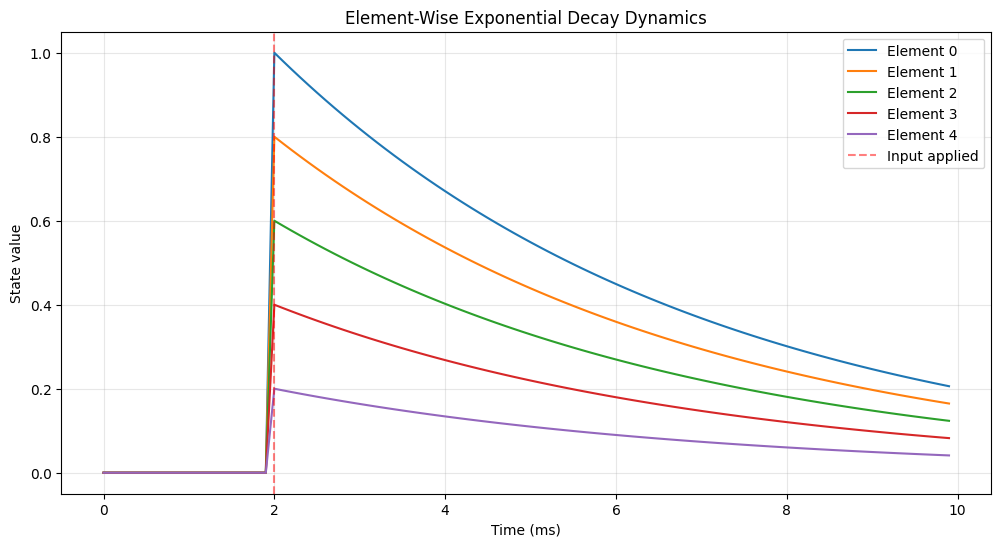
Visualizing Element-Wise Dynamics#
# Reset dynamics
dynamics.v.value = jnp.zeros(5)
# Simulate with step input
n_steps = 100
history = []
for i in range(n_steps):
# Step input at t=20ms
if i == 20:
inp = jnp.array([1.0, 0.8, 0.6, 0.4, 0.2])
else:
inp = jnp.zeros(5)
output = dynamics(inp)
history.append(output)
history = jnp.array(history)
times = jnp.arange(n_steps) * brainstate.environ.get_dt()
# Plot
plt.figure(figsize=(12, 6))
for i in range(5):
plt.plot(times.to_decimal(u.ms), history[:, i], label=f'Element {i}')
plt.axvline(20 * 0.1, color='red', linestyle='--', alpha=0.5, label='Input applied')
plt.xlabel('Time (ms)')
plt.ylabel('State value')
plt.title('Element-Wise Exponential Decay Dynamics')
plt.legend()
plt.grid(alpha=0.3)
plt.show()
print("✅ Each element decays independently (element-wise dynamics)")
print("✅ No interaction between elements (pure dynamics, no connectivity)")
✅ Each element decays independently (element-wise dynamics)
✅ No interaction between elements (pure dynamics, no connectivity)
Part 2: Basic Dynamics Structure#
The Core: update() Function#
Every Dynamics module must implement the update() method, which defines how state variables evolve in time:
class MyDynamics(brainstate.nn.Dynamics):
def __init__(self, in_size):
super().__init__(in_size=in_size)
# Define state variables with brainstate.State
self.state_var = brainstate.State(initial_value)
# Define parameters as regular Python variables (constants)
self.param = value
def update(self, inp):
# 1. Compute state evolution
# 2. Update internal states
# 3. Return output
return output
Key Points#
Input: External drive (current, synaptic input, etc.)
Output: Observable quantity (voltage, firing rate, spikes, etc.)
States: Dynamic variables that change over time (
brainstate.State)Parameters: Constants that don’t change during simulation
Example: Leaky Integrate-and-Fire Neuron#
class SimpleLIF(brainstate.nn.Dynamics):
"""Leaky Integrate-and-Fire neuron dynamics.
Equation: τ dV/dt = -(V - V_rest) + R*I
Spike when V >= V_th, then reset to V_reset
"""
def __init__(self, size, tau=10.0 * u.ms, V_rest=-65.0 * u.mV,
V_th=-50.0 * u.mV, V_reset=-65.0 * u.mV, R=1.0 * u.ohm):
super().__init__(in_size=size)
# State variables (dynamic)
self.V = brainstate.State(jnp.ones(size) * V_rest)
self.spike = brainstate.State(jnp.zeros(size, dtype=bool))
# Parameters (constants)
self.tau = tau
self.V_rest = V_rest
self.V_th = V_th
self.V_reset = V_reset
self.R = R
def update(self, I):
"""Update membrane potential and detect spikes.
Args:
I: Input current
Returns:
Spike events (boolean array)
"""
# Exponential Euler integration for V
dt = brainstate.environ.get_dt()
alpha = jnp.exp(-dt / self.tau)
# Update voltage
V_inf = self.V_rest + self.R * I # Steady state
self.V.value = self.V.value * alpha + V_inf * (1 - alpha)
# Spike detection
self.spike.value = self.V.value >= self.V_th
# Reset voltage for spiking neurons
self.V.value = u.math.where(self.spike.value, self.V_reset, self.V.value)
return self.spike.value
# Create a population of 3 LIF neurons
lif = SimpleLIF(size=(3,))
print("LIF Neuron Population:")
print(f" Size: {lif.in_size}")
print(f" Initial V: {lif.V.value}")
print(f" Threshold: {lif.V_th}")
print(f" Time constant: {lif.tau}")
LIF Neuron Population:
Size: (3,)
Initial V: ArrayImpl([-65., -65., -65.], dtype=float32) * mvolt
Threshold: -50.0 * mvolt
Time constant: 10.0 * msecond
Simulating the LIF Dynamics#
# Reset neuron states
lif.V.value = jnp.ones(3) * lif.V_rest
lif.spike.value = jnp.zeros(3, dtype=bool)
# Simulation parameters
duration = 100 * u.ms
n_steps = int(duration / brainstate.environ.get_dt())
times = jnp.arange(n_steps) * brainstate.environ.get_dt()
# Different input currents for each neuron
I_inputs = jnp.array([20.0, 30.0, 40.0]) * u.mA
def step_run(t):
with brainstate.environ.context(t=t):
spikes = lif(I_inputs)
return lif.V.value, spikes
# Run simulation
V_history, spike_history = brainstate.transform.for_loop(step_run, times)
# Visualization
fig, axes = plt.subplots(2, 1, figsize=(14, 8), sharex=True)
# Membrane potentials
for i in range(3):
axes[0].plot(times.to_decimal(u.ms), V_history[:, i].to_decimal(u.mV),
label=f'Neuron {i} (I={I_inputs[i]})', linewidth=1.5)
axes[0].axhline(lif.V_th.to_decimal(u.mV), color='red', linestyle='--',
alpha=0.5, label='Threshold')
axes[0].set_ylabel('Membrane Potential (mV)')
axes[0].set_title('LIF Dynamics: Element-Wise Computation', fontweight='bold')
axes[0].legend()
axes[0].grid(alpha=0.3)
# Spike rasters
for i in range(3):
spike_times = times[spike_history[:, i]]
if len(spike_times) > 0:
axes[1].eventplot([spike_times.to_decimal(u.ms)], lineoffsets=[i],
colors=[f'C{i}'], linewidths=2)
axes[1].set_ylabel('Neuron Index')
axes[1].set_xlabel('Time (ms)')
axes[1].set_yticks(range(3))
axes[1].set_ylim([-0.5, 2.5])
axes[1].grid(alpha=0.3)
plt.tight_layout()
plt.show()
# Statistics
for i in range(3):
n_spikes = jnp.sum(spike_history[:, i])
rate = n_spikes / duration * 1000 * u.Hz
print(f"Neuron {i}: {n_spikes} spikes, rate = {rate:.2f}")
print("\n✅ Each neuron evolves independently (element-wise)")
print("✅ Different inputs lead to different firing rates")
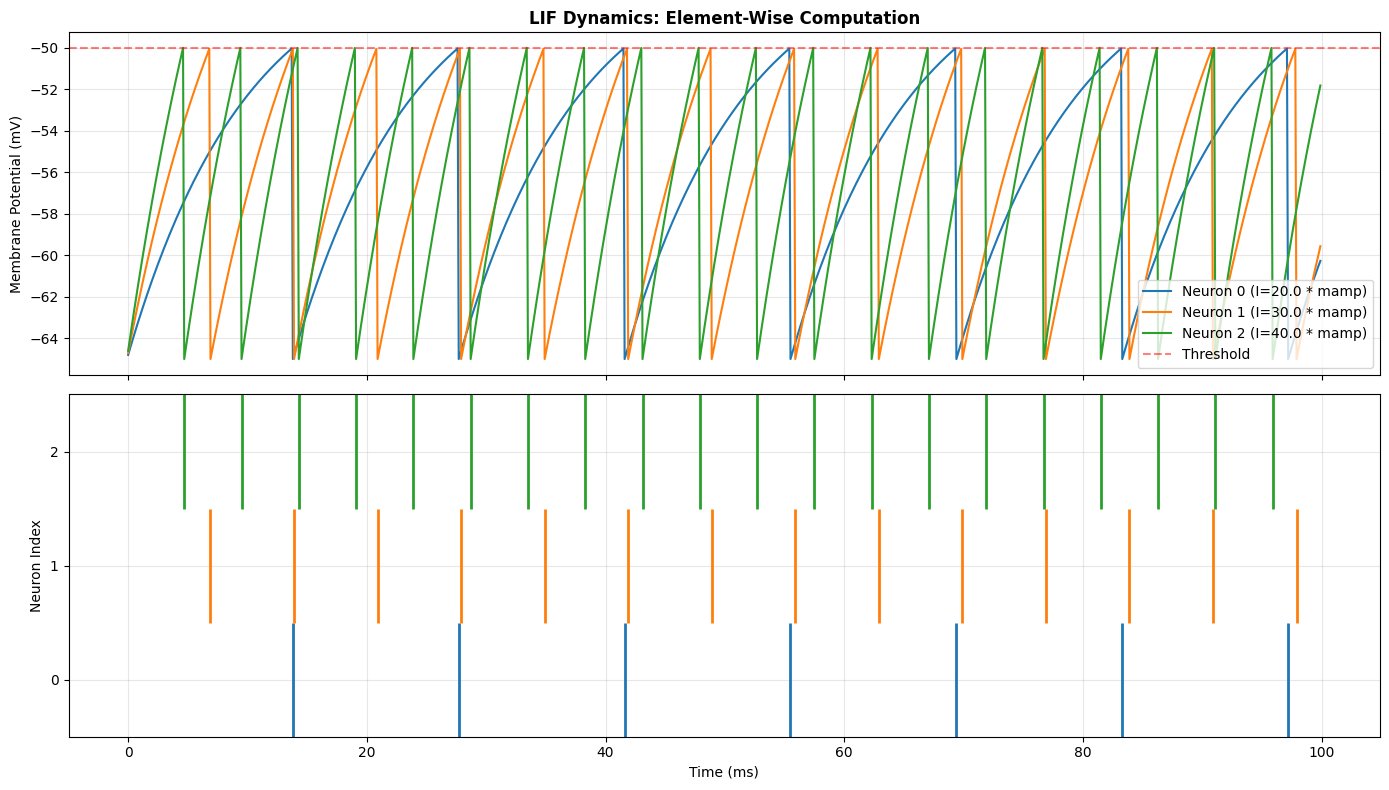
Neuron 0: 7 spikes, rate = 70.00 * becquerel2
Neuron 1: 14 spikes, rate = 140.00 * becquerel2
Neuron 2: 20 spikes, rate = 200.00 * becquerel2
✅ Each neuron evolves independently (element-wise)
✅ Different inputs lead to different firing rates
Part 3: Before/After Update Mechanism#
Dynamics supports flexible control flow through before-update and after-update hooks. These allow you to insert custom logic at specific points in the update cycle.
Basic Usage#
# Add functions to execute before/after update
dynamics.add_before_update(key, function)
dynamics.add_after_update(key, function)
Default Behavior#
before_update: Does NOT receive
update()input parametersafter_update: DOES receive
update()return value
# Execution flow:
for fn in before_updates:
fn() # No parameters
output = dynamics.update(inp) # Main update
for fn in after_updates:
fn(output) # Receives output
Custom Control#
You can modify this behavior using decorators:
brainstate.nn.receive_update_input(fn): Make before_update receive inputbrainstate.nn.not_receive_update_output(fn): Make after_update NOT receive output
Example: Monitoring with Before/After Updates#
class MonitoredLIF(brainstate.nn.Dynamics):
"""LIF with monitoring hooks."""
def __init__(self, size):
super().__init__(in_size=size)
# States
self.V = brainstate.State(jnp.ones(size) * -65.0 * u.mV)
self.spike = brainstate.State(jnp.zeros(size, dtype=bool))
# Monitoring statistics
self.min_V = brainstate.State(jnp.ones(size) * jnp.inf * u.mV)
self.max_V = brainstate.State(jnp.ones(size) * -jnp.inf * u.mV)
self.total_spikes = brainstate.State(jnp.zeros(size, dtype=int))
# Parameters
self.tau = 10.0 * u.ms
self.V_rest = -65.0 * u.mV
self.V_th = -50.0 * u.mV
self.V_reset = -65.0 * u.mV
def update(self, I):
# Update voltage
dt = brainstate.environ.get_dt()
alpha = jnp.exp(-dt / self.tau)
V_inf = self.V_rest + I * 1.0 * u.ohm
self.V.value = self.V.value * alpha + V_inf * (1 - alpha)
# Detect spikes
self.spike.value = self.V.value >= self.V_th
self.V.value = u.math.where(self.spike.value, self.V_reset, self.V.value)
return self.spike.value
# Create neuron
neuron = MonitoredLIF(size=(2,))
# Define monitoring functions
def before_check():
"""Check state before update (no parameters)."""
print(f" [Before] V = {neuron.V.value}")
def after_statistics(spikes):
"""Update statistics after update (receives output)."""
# Update min/max voltage
neuron.min_V.value = u.math.minimum(neuron.min_V.value, neuron.V.value)
neuron.max_V.value = u.math.maximum(neuron.max_V.value, neuron.V.value)
# Count spikes
neuron.total_spikes.value += spikes
def after_log(spikes):
"""Log output after update (receives output)."""
if jnp.any(spikes):
print(f" [After] Spike detected! Neurons: {jnp.where(spikes)[0]}")
# Add hooks (only for demonstration, normally not called every step)
neuron.add_after_update('statistics', after_statistics)
print("Running simulation with after-update monitoring...\n")
# Simulate for a few steps
for i in range(5):
print(f"Step {i + 1}:")
I = jnp.array([3.0, 4.0]) * u.nA
spikes = neuron(I)
print(f" Spikes: {spikes}")
print(f" Total spikes so far: {neuron.total_spikes.value}\n")
print("Final statistics:")
print(f" Min V: {neuron.min_V.value}")
print(f" Max V: {neuron.max_V.value}")
print(f" Total spikes: {neuron.total_spikes.value}")
print("\n"
"✅ After-update hooks receive the output")
print("✅ Useful for monitoring, logging, and statistics")
Running simulation with after-update monitoring...
Step 1:
Spikes: [False False]
Total spikes so far: [0 0]
Step 2:
Spikes: [False False]
Total spikes so far: [0 0]
Step 3:
Spikes: [False False]
Total spikes so far: [0 0]
Step 4:
Spikes: [False False]
Total spikes so far: [0 0]
Step 5:
Spikes: [False False]
Total spikes so far: [0 0]
Final statistics:
Min V: ArrayImpl([-65., -65.], dtype=float32) * mvolt
Max V: ArrayImpl([-65., -65.], dtype=float32) * mvolt
Total spikes: [0 0]
✅ After-update hooks receive the output
✅ Useful for monitoring, logging, and statistics
Example: Custom Input/Output Control#
# Create a new neuron for this example
neuron2 = MonitoredLIF(size=(1,))
# Before-update that RECEIVES input
@brainstate.nn.receive_update_input
class InputLogger:
def __call__(self, I):
print(f" [Before with input] Received I = {I}")
# After-update that DOES NOT receive output
@brainstate.nn.not_receive_update_output
class StateLogger:
def __init__(self, neuron):
self.neuron = neuron
def __call__(self):
print(f" [After without output] Current V = {self.neuron.V.value[0]}")
# Add custom hooks
neuron2.add_before_update('input_log', InputLogger())
neuron2.add_after_update('state_log', StateLogger(neuron2))
print("Running with custom input/output control:\n")
for i in range(3):
print(f"Step {i + 1}:")
neuron2(jnp.array([3.5]) * u.nA)
print()
print("✅ receive_update_input: before-update receives input")
print("✅ not_receive_update_output: after-update doesn't receive output")
Running with custom input/output control:
Step 1:
[Before with input] Received I = ArrayImpl([3.5], dtype=float32) * namp
[After without output] Current V = -65.0 * mvolt
Step 2:
[Before with input] Received I = ArrayImpl([3.5], dtype=float32) * namp
[After without output] Current V = -65.0 * mvolt
Step 3:
[Before with input] Received I = ArrayImpl([3.5], dtype=float32) * namp
[After without output] Current V = -65.0 * mvolt
✅ receive_update_input: before-update receives input
✅ not_receive_update_output: after-update doesn't receive output
Part 4: Input/Output Size Definition#
Size Management#
Dynamics modules use in_size to define the geometry of the neuron population:
# 1D population
dynamics = MyDynamics(in_size=10) # or in_size=(10,)
# 2D population
dynamics = MyDynamics(in_size=(10, 20))
# 3D population
dynamics = MyDynamics(in_size=(10, 20, 5))
Key Attributes#
in_size: Input shape (tuple)out_size: Output shape (default: same asin_size)varshape: Alias forin_size(variable shape)
Size Consistency#
This design ensures consistency with the Module class and enables seamless integration into larger network architectures.
Example: Multi-Dimensional Populations#
# 1D population (line of neurons)
pop_1d = SimpleLIF(size=10)
print("1D Population:")
print(f" in_size: {pop_1d.in_size}")
print(f" out_size: {pop_1d.out_size}")
print(f" varshape: {pop_1d.varshape}")
print(f" V shape: {pop_1d.V.value.shape}\n")
# 2D population (grid of neurons)
pop_2d = SimpleLIF(size=(8, 8))
print("2D Population (8x8 grid):")
print(f" in_size: {pop_2d.in_size}")
print(f" out_size: {pop_2d.out_size}")
print(f" varshape: {pop_2d.varshape}")
print(f" V shape: {pop_2d.V.value.shape}\n")
# 3D population (volume of neurons)
pop_3d = SimpleLIF(size=(4, 4, 4))
print("3D Population (4x4x4 volume):")
print(f" in_size: {pop_3d.in_size}")
print(f" out_size: {pop_3d.out_size}")
print(f" varshape: {pop_3d.varshape}")
print(f" V shape: {pop_3d.V.value.shape}\n")
# Demonstrate element-wise operation with 2D input
I_2d = brainstate.random.randn(8, 8) * u.nA
spikes_2d = pop_2d(I_2d)
print(f"Applied 2D input with shape {I_2d.shape}")
print(f"Got 2D output with shape {spikes_2d.shape}")
print(f"Number of spikes: {jnp.sum(spikes_2d)}")
print("\n✅ Dynamics supports arbitrary dimensional populations")
print("✅ in_size defines the geometry of the population")
print("✅ Element-wise operations preserve dimensionality")
1D Population:
in_size: (10,)
out_size: (10,)
varshape: (10,)
V shape: (10,)
2D Population (8x8 grid):
in_size: (8, 8)
out_size: (8, 8)
varshape: (8, 8)
V shape: (8, 8)
3D Population (4x4x4 volume):
in_size: (4, 4, 4)
out_size: (4, 4, 4)
varshape: (4, 4, 4)
V shape: (4, 4, 4)
Applied 2D input with shape (8, 8)
Got 2D output with shape (8, 8)
Number of spikes: 0
✅ Dynamics supports arbitrary dimensional populations
✅ in_size defines the geometry of the population
✅ Element-wise operations preserve dimensionality
Part 5: Delay Support Mechanism#
Dynamics naturally supports temporal delays through the after-update mechanism, which is crucial for neural dynamics modeling.
Two Types of Delays#
1. Output Delay#
Delay the output of update() for downstream modules:
# Create delayed output reference
delayed_output = dynamics.output_delay(5.0 * u.ms)
# Access delayed value
value = delayed_output()
2. State Delay (Prefetch Delay)#
Delay a specific state variable:
# Prefetch delayed state (before init_state is called)
delayed_V = dynamics.prefetch_delay('V', delay_time=5.0 * u.ms)
# Access delayed voltage
v_delayed = delayed_V()
Automatic Synchronization#
After each update(), the delay buffer is automatically updated through the after-update hook. No manual management required!
Use Cases#
Axonal delays
Synaptic delays
Feedback connections
Time-delayed systems
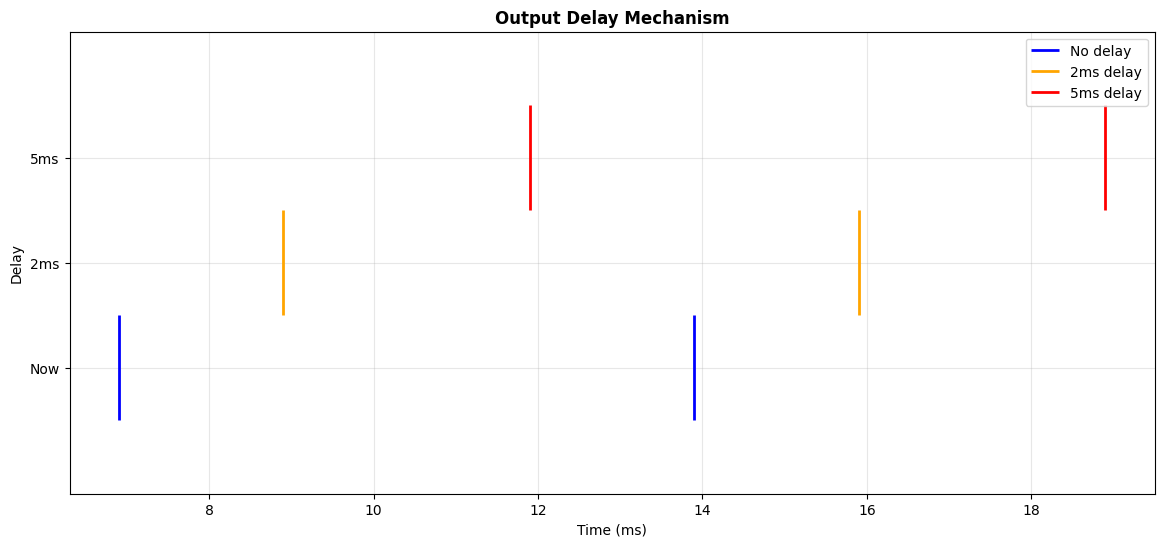
Example: Output Delay#
# Create neuron
neuron = SimpleLIF(size=(1,))
# Create delayed output references
output_now = neuron # No delay
output_delayed_2ms = neuron.output_delay(2.0 * u.ms)
output_delayed_5ms = neuron.output_delay(5.0 * u.ms)
brainstate.nn.init_all_states(neuron)
print("Simulating with output delays...\n")
# Simulate
n_steps = 200
history_now = []
history_2ms = []
history_5ms = []
for i in range(n_steps):
t = i * brainstate.environ.get_dt()
with brainstate.environ.context(t=t, i=i):
# Update neuron (immediate output)
spike_now = neuron(30.0 * u.mA)
# Access delayed outputs
spike_2ms = output_delayed_2ms()
spike_5ms = output_delayed_5ms()
history_now.append(spike_now[0])
history_2ms.append(spike_2ms[0])
history_5ms.append(spike_5ms[0])
history_now = jnp.where(jnp.array(history_now))[0]
history_2ms = jnp.where(jnp.array(history_2ms))[0]
history_5ms = jnp.where(jnp.array(history_5ms))[0]
times = jnp.arange(n_steps) * brainstate.environ.get_dt()
# Visualize
plt.figure(figsize=(14, 6))
# Find spike times
spikes_now = times[history_now]
spikes_2ms = times[history_2ms]
spikes_5ms = times[history_5ms]
if len(spikes_now) > 0:
plt.eventplot(
[spikes_now.to_decimal(u.ms)],
lineoffsets=[0],
colors='blue',
linewidths=2,
label='No delay'
)
if len(spikes_2ms) > 0:
plt.eventplot(
[spikes_2ms.to_decimal(u.ms)],
lineoffsets=[1],
colors='orange',
linewidths=2,
label='2ms delay'
)
if len(spikes_5ms) > 0:
plt.eventplot(
[spikes_5ms.to_decimal(u.ms)],
lineoffsets=[2],
colors='red',
linewidths=2,
label='5ms delay'
)
plt.yticks([0, 1, 2], ['Now', '2ms', '5ms'])
plt.xlabel('Time (ms)')
plt.ylabel('Delay')
plt.title('Output Delay Mechanism', fontweight='bold')
plt.legend()
plt.grid(alpha=0.3)
plt.show()
print("✅ Output delay shifts spikes in time")
print("✅ Multiple delays can coexist")
print("✅ Delays are automatically managed")
Simulating with output delays...
✅ Output delay shifts spikes in time
✅ Multiple delays can coexist
✅ Delays are automatically managed
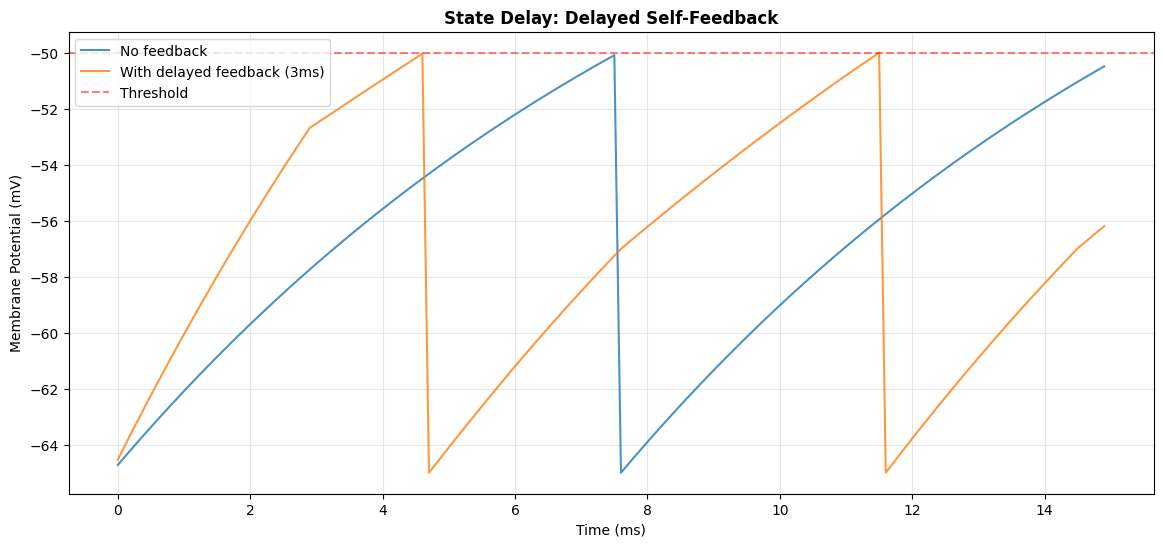
Example: State Delay (Prefetch Delay)#
class DelayedFeedbackLIF(brainstate.nn.Dynamics):
"""LIF with delayed self-feedback."""
def __init__(self, size, feedback_delay=3.0 * u.ms, feedback_strength=0.5):
super().__init__(in_size=size)
# Create delayed voltage reference
self.V_delayed = self.prefetch_delay('V', feedback_delay)
# Parameters
self.tau = 10.0 * u.ms
self.V_rest = -65.0 * u.mV
self.V_th = -50.0 * u.mV
self.V_reset = -65.0 * u.mV
self.feedback_strength = feedback_strength
def init_state(self, *args, **kwargs):
self.V = brainstate.State(jnp.ones(self.varshape) * -65.0 * u.mV)
self.spike = brainstate.State(jnp.zeros(self.varshape, dtype=bool))
def update(self, I):
# Get delayed voltage for feedback
V_delayed = self.V_delayed()
# Add delayed feedback to input
feedback_current = (V_delayed - self.V_rest) * self.feedback_strength / (1.0 * u.ohm)
I_total = I + feedback_current
# Update voltage
dt = brainstate.environ.get_dt()
alpha = jnp.exp(-dt / self.tau)
V_inf = self.V_rest + I_total * 1.0 * u.ohm
self.V.value = self.V.value * alpha + V_inf * (1 - alpha)
# Spike
self.spike.value = self.V.value >= self.V_th
self.V.value = u.math.where(self.spike.value, self.V_reset, self.V.value)
return self.spike.value
# Create neurons: one with feedback, one without
neuron_no_fb = SimpleLIF(size=(1,))
neuron_fb = DelayedFeedbackLIF(size=(1,), feedback_delay=3.0 * u.ms, feedback_strength=0.3)
brainstate.nn.init_all_states(neuron_no_fb)
brainstate.nn.init_all_states(neuron_fb)
# Simulate both
n_steps = 150
V_no_fb = []
V_fb = []
for i in range(n_steps):
t = i * brainstate.environ.get_dt()
with brainstate.environ.context(t=t, i=i):
neuron_no_fb(28.0 * u.mA)
neuron_fb(28.0 * u.mA)
V_no_fb.append(neuron_no_fb.V.value[0])
V_fb.append(neuron_fb.V.value[0])
V_no_fb = u.math.array(V_no_fb)
V_fb = u.math.array(V_fb)
times = jnp.arange(n_steps) * brainstate.environ.get_dt()
# Plot
plt.figure(figsize=(14, 6))
plt.plot(
times.to_decimal(u.ms),
V_no_fb.to_decimal(u.mV),
label='No feedback',
linewidth=1.5,
alpha=0.8
)
plt.plot(
times.to_decimal(u.ms),
V_fb.to_decimal(u.mV),
label='With delayed feedback (3ms)',
linewidth=1.5,
alpha=0.8
)
plt.axhline(-50, color='red', linestyle='--', alpha=0.5, label='Threshold')
plt.xlabel('Time (ms)')
plt.ylabel('Membrane Potential (mV)')
plt.title('State Delay: Delayed Self-Feedback', fontweight='bold')
plt.legend()
plt.grid(alpha=0.3)
plt.show()
print("✅ prefetch_delay accesses delayed state variables")
print("✅ Delayed feedback creates oscillatory dynamics")
print("✅ Delay buffer is automatically synchronized after update()")
✅ prefetch_delay accesses delayed state variables
✅ Delayed feedback creates oscillatory dynamics
✅ Delay buffer is automatically synchronized after update()
Part 6: Ecosystem Integration#
The Dynamics protocol is the foundation of the BrainPy ecosystem, providing a unified interface across multiple systems:
brainpy.state - General Dynamical Systems#
Implements common neuron models (LIF, HH, Izhikevich) and synapse models (Exponential, Alpha, NMDA).
import brainpy
# All follow the Dynamics protocol
lif = brainpy.state.LIF(100)
hh = brainpy.state.ALIF(50)
syn = brainpy.state.Expon(100, tau=5.0)
brainmass - Neural Mass Models#
Large-scale brain modeling with population dynamics.
import brainmass
wilson_cowan = brainmass.WilsonCowanModel((10, 10))
jansen_rit = brainmass.JansenRitModel(5)
braincell - Detailed Neuron Models#
Multi-compartment neurons with dendritic dynamics.
import braincell
ca = braincell.channel.ICaT_HM1992(10)
na = braincell.ion.Sodium(10)
Unified Benefits#
✅ Same API - All use update(), before/after updates, delays
✅ Composable - Mix and match across systems
✅ Consistent - Learn once, use everywhere
✅ Scalable - From single neurons to whole brain models
Summary#
Key Takeaways#
1. Dynamics Concept#
Defines element-wise temporal evolution of state variables
Does NOT include inter-neuron connectivity
Foundation for all dynamical systems in the ecosystem
2. Basic Structure#
Implement
update(inp)to define state evolutionUse
brainstate.Statefor dynamic variablesUse regular Python variables for constants
3. Before/After Updates#
add_before_update(key, fn)- Execute beforeupdate()add_after_update(key, fn)- Execute afterupdate()Control parameter passing with decorators
4. Size Management#
in_sizedefines population geometryout_sizetypically matchesin_sizevarshapeis an alias forin_size
5. Delay Support#
output_delay(time)- Delay the outputprefetch_delay(state, time)- Delay a specific stateAutomatic synchronization through after-updates
6. Ecosystem Integration#
Unified interface across brainpy.state, brainmass, braincell
Composable and interoperable
Learn once, use everywhere
Best Practices#
✅ Always call super().__init__(in_size=size) in __init__
✅ Use brainstate.State for variables that change during simulation
✅ Use regular variables for constants (parameters, time constants)
✅ Return meaningful outputs from update() (spikes, voltages, etc.)
✅ Use delays through the protocol rather than manual buffering
✅ Leverage before/after updates for monitoring and statistics
Protocol Summary#
class MyDynamics(brainstate.nn.Dynamics):
def __init__(self, in_size, **params):
super().__init__(in_size=in_size)
# States (dynamic variables)
self.state = brainstate.State(initial_value)
# Parameters (constants)
self.param = value
# Optional: prefetch delays
self.state_delayed = self.prefetch_delay('state', delay_time)
def update(self, inp):
# 1. Compute new state values
# 2. Update self.state.value
# 3. Return output
return output
Exercise: Implement Your Own Dynamics#
Task#
Implement a simplified Izhikevich neuron model:
When \(v \geq 30\): spike, then \(v \leftarrow c\), \(u \leftarrow u + d\)
Requirements#
Inherit from
brainstate.nn.DynamicsDefine states
vanduDefine parameters
a,b,c,dImplement
update(I)with Euler integrationReturn spike events
Starter Code#
class Izhikevich(brainstate.nn.Dynamics):
"""Izhikevich neuron model."""
def __init__(self, size, a=0.02, b=0.2, c=-65.0, d=8.0):
# TODO: Initialize parent class
# TODO: Create states v and u
# TODO: Store parameters a, b, c, d
pass
def update(self, I):
# TODO: Implement Euler integration
# TODO: Detect spikes (v >= 30)
# TODO: Reset v and u when spike occurs
# TODO: Return spike events
pass
# Test your implementation
# izh = Izhikevich(size=1)
# for i in range(100):
# spike = izh(jnp.array([10.0]))
# if spike[0]:
# print(f"Spike at step {i}")
Solution Hints#
Click to show hints
Initialization:
super().__init__(in_size=size) self.v = brainstate.State(jnp.ones(size) * -65.0) self.u = brainstate.State(jnp.ones(size) * b * -65.0)
Euler integration:
dt = brainstate.environ.get_dt().to_decimal(u.ms) dv = (0.04 * v**2 + 5*v + 140 - u + I) * dt du = a * (b*v - u) * dt
Spike detection and reset:
spike = v >= 30 v = jnp.where(spike, c, v) u = jnp.where(spike, u + d, u)
Further Exploration#
Add delayed self-feedback using
prefetch_delayAdd monitoring using before/after updates
Implement different Izhikevich neuron types (RS, IB, CH, FS)
Combine with synaptic models from brainpy.state
Additional Resources#
Documentation#
Papers#
Izhikevich, E. M. (2003). Simple model of spiking neurons. IEEE Transactions on neural networks.
Brette, R., & Gerstner, W. (2005). Adaptive exponential integrate-and-fire model.
Gerstner, W., et al. (2014). Neuronal Dynamics: From Single Neurons to Networks and Models of Cognition.