Defining Differential Equations#
This page shows how to express a differential-equation system in braincell
using the two protocol pieces introduced in the overview:
DiffEqState and DiffEqModule. By the end you will have built a runnable
model from scratch and integrated it with a real solver.
import brainstate
import numpy as np
import jax.numpy as jnp
import matplotlib.pyplot as plt
import braincell
from braincell import DiffEqState, DiffEqModule
DiffEqState: a variable the solver integrates#
DiffEqState extends brainstate.HiddenState with two extra slots that the
solver reads and writes during a step:
derivative— the right-hand side \(f(t, y)\) of an ODE \(\dot y = f(t, y)\), or the drift term of an SDE. You set this insidecompute_derivative.diffusion— the noise coefficient of an SDE. It staysNonefor ordinary (deterministic) systems. See Advanced Integration for the current status of stochastic solvers.
The units rule#
If your state carries physical units, the derivative must carry units such that
For a membrane potential in mV integrated with dt in ms, the derivative
must be in mV/ms. The examples below stay dimensionless for clarity, but this
constraint is what lets braincell integrate fully unit-aware neuron models.
DiffEqModule: the integrable container#
DiffEqModule is a mixin that exposes the per-step lifecycle. To build a model
you combine it with a brainstate node so its states are discoverable by the
solver:
class MyModel(brainstate.nn.Dynamics, DiffEqModule):
...
You override:
compute_derivative(required) — writestate.derivativefor everyDiffEqStatethe module owns.pre_integral/post_integral(optional) — one-time-per-step work before and after the solver combines values and derivatives.
Worked example 1 — scalar exponential decay#
The simplest non-trivial ODE is exponential decay,
whose exact solution is \(y(t) = e^{-t/\tau}\). We model it as a single
DiffEqState.
class Decay(brainstate.nn.Dynamics, DiffEqModule):
def __init__(self, tau=10.0):
super().__init__(in_size=1)
self.tau = tau
def init_state(self, *args):
# the one variable we integrate, initialised to 1.0
self.y = DiffEqState(jnp.ones(1))
def compute_derivative(self, *args):
# dy/dt = -y / tau
self.y.derivative = -self.y.value / self.tau
To run it we pick a solver from the registry and step inside a
brainstate.environ context that supplies dt (and t each step).
def integrate(model, solver_name, dt=0.1, t_end=50.0):
brainstate.nn.init_all_states(model)
step = braincell.quad.get_integrator(solver_name)
n = int(t_end / dt)
ts, ys = [], []
with brainstate.environ.context(dt=dt):
for i in range(n):
with brainstate.environ.context(t=i * dt):
step(model)
ts.append((i + 1) * dt)
ys.append(float(model.y.value[0]))
return np.array(ts), np.array(ys)
t, y_rk4 = integrate(Decay(tau=10.0), "rk4")
t_exact = np.linspace(0, t[-1], 400)
y_exact = np.exp(-t_exact / 10.0)
plt.figure(figsize=(6, 3.5))
plt.plot(t_exact, y_exact, "k-", label="exact $e^{-t/\\tau}$")
plt.plot(t[::5], y_rk4[::5], "o", ms=4, label="rk4")
plt.xlabel("t"); plt.ylabel("y"); plt.legend(); plt.title("Exponential decay")
plt.tight_layout(); plt.show()
print("max abs error (rk4):", np.max(np.abs(y_rk4 - np.exp(-t / 10.0))))
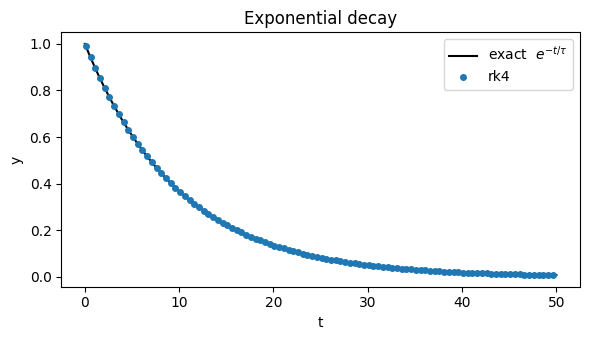
max abs error (rk4): 2.1823778006968553e-07
The Runge-Kutta solution sits right on top of the analytic curve — the error is at the level of floating-point noise for this smooth, well-conditioned problem.
Worked example 2 — a two-state system#
A module can own several DiffEqStates. Here is an undamped harmonic
oscillator,
which traces \(x(t) = \cos(\omega t)\) for \(x(0)=1,\ v(0)=0\). Each variable is its
own DiffEqState, and compute_derivative fills both in one pass.
class Oscillator(brainstate.nn.Dynamics, DiffEqModule):
def __init__(self, omega=1.0):
super().__init__(in_size=1)
self.omega = omega
def init_state(self, *args):
self.x = DiffEqState(jnp.ones(1)) # position, x(0) = 1
self.v = DiffEqState(jnp.zeros(1)) # velocity, v(0) = 0
def compute_derivative(self, *args):
self.x.derivative = self.v.value
self.v.derivative = -(self.omega ** 2) * self.x.value
osc = Oscillator(omega=2.0)
brainstate.nn.init_all_states(osc)
step = braincell.quad.get_integrator("rk4")
dt, n = 0.01, 1000
ts, xs = [], []
with brainstate.environ.context(dt=dt):
for i in range(n):
with brainstate.environ.context(t=i * dt):
step(osc)
ts.append((i + 1) * dt)
xs.append(float(osc.x.value[0]))
ts, xs = np.array(ts), np.array(xs)
plt.figure(figsize=(6, 3.5))
plt.plot(ts, np.cos(2.0 * ts), "k-", label=r"exact $\cos(\omega t)$")
plt.plot(ts[::40], xs[::40], "o", ms=4, label="rk4")
plt.xlabel("t"); plt.ylabel("x"); plt.legend(); plt.title("Harmonic oscillator")
plt.tight_layout(); plt.show()
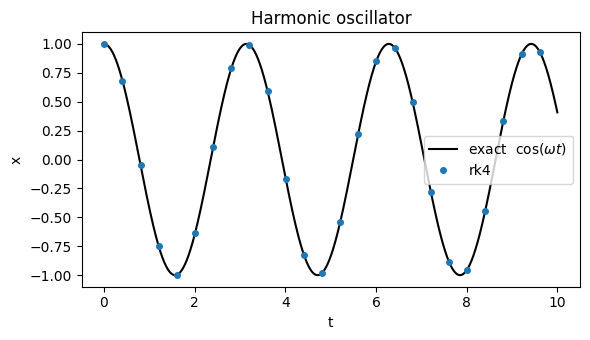
Both DiffEqStates are advanced together by the same solver step — you
never integrate them by hand. That is the payoff of the protocol: you write the
right-hand side, and braincell.quad does the stepping.
Where to go next#
Choosing and Using Solvers — the full solver catalog, how to pick one for stiff neural dynamics, and the high-level
solver=shortcut.Advanced Integration — per-subsystem solvers, the stochastic
diffusionslot, and registering your own integrator.