Choosing and Using Solvers#
braincell.quad ships a family of numerical integrators. This page shows how
to discover them, the two ways to apply them, and — most importantly — how to
choose one for the stiff dynamics that are typical of biophysical neurons.
import brainstate
import brainunit as u
import numpy as np
import jax.numpy as jnp
import matplotlib.pyplot as plt
import braincell
from braincell import DiffEqState, DiffEqModule
The solver catalog#
Integrators are grouped into categories. We can read them straight out of the registry.
registry = braincell.quad.get_registry()
by_cat = {}
for name in registry.names():
entry = registry.entry(name)
by_cat.setdefault(entry.category, []).append(name)
for category, names in sorted(by_cat.items()):
print(f"{category:>12} : {sorted(names)}")
explicit : ['euler', 'heun2', 'heun3', 'midpoint', 'ralston2', 'ralston3', 'ralston4', 'rk2', 'rk3', 'rk4', 'ssprk3']
exponential : ['exp_euler', 'exp_exp_euler', 'ind_exp_euler']
implicit : ['backward_euler', 'cn_exp_euler', 'cn_rk4', 'implicit_euler', 'implicit_exp_euler', 'implicit_rk4', 'splitting']
staggered : ['staggered']
voltage : ['dhs_voltage']
The families, in rough order of how often you reach for them in neural modeling:
Category |
Examples |
Character |
|---|---|---|
|
|
Classical Runge-Kutta. Cheap per step, high order available, but only conditionally stable — small |
|
|
Treat the fast linear part exactly. Stable at large |
|
|
Solve an implicit equation each step. Strong stability for very stiff problems at the cost of per-step linear solves. |
|
|
Specialised schemes for multi-compartment cable equations. |
Two ways to apply a solver#
1. High-level: solver= on a cell#
For a full neuron model you simply name the solver at construction. braincell
wires the lifecycle and stepping for you. Below is a minimal Hodgkin-Huxley
point neuron (the same recipe used in the single-compartment examples).
class HH(braincell.SingleCompartment):
def __init__(self, size, solver="exp_euler"):
super().__init__(size, solver=solver)
self.na = braincell.ion.SodiumFixed(size, E=50. * u.mV)
self.na.add(INa=braincell.channel.Na_HH1952(size))
self.k = braincell.ion.PotassiumFixed(size, E=-77. * u.mV)
self.k.add(IK=braincell.channel.K_HH1952(size))
self.IL = braincell.channel.IL(size, E=-54.387 * u.mV,
g_max=0.03 * (u.mS / u.cm ** 2))
def simulate(solver, dt=0.1, t_end=100.):
neuron = HH(1, solver=solver)
neuron.init_state()
def step(t):
with brainstate.environ.context(t=t):
neuron.update(10. * u.nA / u.cm ** 2) # constant drive
return neuron.V.value
with brainstate.environ.context(dt=dt * u.ms):
times = u.math.arange(0. * u.ms, t_end * u.ms, brainstate.environ.get_dt())
vs = brainstate.transform.for_loop(step, times)
return np.asarray(times.to_decimal(u.ms)), np.asarray(u.math.squeeze(vs).to_decimal(u.mV))
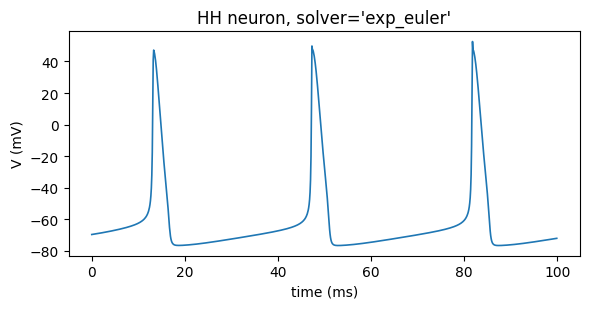
t, v = simulate("exp_euler")
plt.figure(figsize=(6, 3.2))
plt.plot(t, v, lw=1.2)
plt.xlabel("time (ms)"); plt.ylabel("V (mV)")
plt.title("HH neuron, solver='exp_euler'")
plt.tight_layout(); plt.show()
2. Low-level: call the step function directly#
When you drive a bare DiffEqModule yourself (as in the
previous page), fetch the step function from the registry and call it
inside an environ context. This path works with the generic explicit
Runge-Kutta solvers, which make no assumption about the model being a neuron.
class Decay(brainstate.nn.Dynamics, DiffEqModule):
def __init__(self, tau=10.0):
super().__init__(in_size=1)
self.tau = tau
def init_state(self, *args):
self.y = DiffEqState(jnp.ones(1))
def compute_derivative(self, *args):
self.y.derivative = -self.y.value / self.tau
def run_decay(solver_name, dt=0.1, t_end=50.0):
model = Decay(tau=10.0)
brainstate.nn.init_all_states(model)
step = braincell.quad.get_integrator(solver_name)
n = int(t_end / dt)
with brainstate.environ.context(dt=dt):
for i in range(n):
with brainstate.environ.context(t=i * dt):
step(model)
last_t = (i + 1) * dt
return last_t, float(model.y.value[0])
run_decay("rk4")
(50.0, 0.006737955845892429)
Accuracy: order matters#
On a smooth problem, a higher-order method reaches a given accuracy with far
fewer, larger steps. Here is the global error at \(t=50\) for the decay problem
(\(y(50) = e^{-5}\)) across three explicit schemes at the same dt.
exact = np.exp(-5.0)
print(f"{'solver':>10} {'order':>5} {'y(50)':>12} {'abs error':>12}")
for name in ["euler", "midpoint", "rk4"]:
order = braincell.quad.get_registry().entry(name).order
_, y = run_decay(name, dt=0.5)
print(f"{name:>10} {order:>5} {y:>12.3e} {abs(y - exact):>12.3e}")
solver order y(50) abs error
euler 1 5.921e-03 8.174e-04
midpoint 2 6.753e-03 1.459e-05
rk4 4 6.738e-03 9.306e-10
First-order Euler trails the fourth-order RK4 by several orders of magnitude at the same step size. For smooth problems, prefer a higher-order explicit method.
Stability: why neurons need special solvers#
Accuracy is not the whole story. Hodgkin-Huxley gating variables relax on a
sub-millisecond timescale while the spike itself plays out over milliseconds —
the system is stiff. Explicit methods are only conditionally stable: push
dt past a threshold and they blow up, no matter their order.
The demonstration below runs the same HH neuron at dt = 0.1 ms with an
exponential integrator and with explicit RK4.
t_exp, v_exp = simulate("exp_euler", dt=0.1)
t_rk4, v_rk4 = simulate("rk4", dt=0.1)
print("exp_euler : max |V| =", f"{np.nanmax(np.abs(v_exp)):.1f} mV",
"| any NaN:", bool(np.isnan(v_exp).any()))
print("rk4 : max |V| =", f"{np.nanmax(np.abs(v_rk4)):.1f} mV"
if not np.isnan(v_rk4).all() else "nan",
"| any NaN:", bool(np.isnan(v_rk4).any()))
plt.figure(figsize=(6, 3.2))
plt.plot(t_exp, v_exp, lw=1.2, label="exp_euler (stable)")
plt.xlabel("time (ms)"); plt.ylabel("V (mV)")
plt.title("Same neuron, same dt=0.1 ms")
plt.legend(); plt.tight_layout(); plt.show()
exp_euler : max |V| = 76.6 mV | any NaN: False
rk4 : max |V| = 158.2 mV | any NaN: True
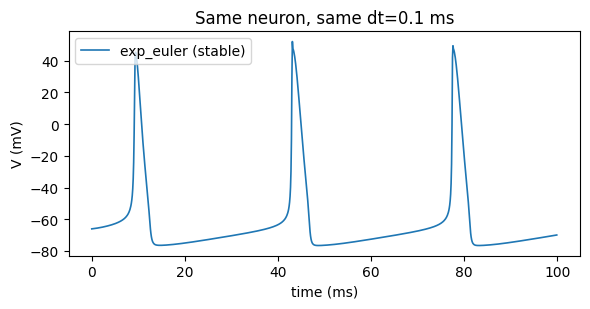
At dt = 0.1 ms exp_euler produces a clean spike train, while explicit
RK4 diverges to NaN. This is why exponential integrators (exp_euler, ind_exp_euler) are the
recommended choice for point neurons: they remain stable at the step sizes that
make large simulations affordable. (The SingleCompartment default is the
explicit rk2, so for stiff models you will usually want to pass solver=...
explicitly.)
For a side-by-side comparison of several integrators on a neuron — including how the spike timing shifts between methods — see the worked example Effects of Different Integration Methods on HH Neuron Dynamics.
Choosing a solver — rules of thumb#
Point neurons (single compartment): start with
exp_eulerorind_exp_euler. They are stable atdt = 0.1 msand accurate enough for spike-level fidelity.Very stiff or near-equilibrium dynamics: an
implicitmethod (backward_euler,implicit_exp_euler) trades per-step cost for robustness.Smooth, non-stiff sub-systems you drive yourself: the explicit Runge-Kutta family (
rk4,midpoint) is simplest and works on anyDiffEqModule.Multi-compartment cables: see the
staggered/dhs_voltageschemes, which exploit the tree structure of the morphology.
The next page covers mixing solvers across sub-systems, the
stochastic diffusion slot, and registering your own integrator.