Building a Data-Driven Workflow#
This is the extension playbook for data-driven modeling in brainmass:
the stable contract you build a custom, fittable model against. Every piece
below is a public API the rest of the ecosystem – and future tooling like the
deferred Trainer (see the final section) – composes with.
We will go end to end:
Expose trainable parameters on a custom model with
Param(value, fit=True).Write a loss as a small
objectives-stylecallable(prediction, target).Fit it two ways: with the high-level
brainmass.Fitter, and with a hand-written training loop overbraintools.optim+brainstate.transform.grad.Batch the search with
vmap.
The data-driven layer is the center of gravity of brainmass (see
Data-Driven Modeling). Read Creating Custom Models first for the model
contract itself; this guide is about making a model learnable.
1. A model with trainable parameters#
A trainable parameter is just a brainstate.nn.Param with fit=True. That wraps
the value in a ParamState (a leaf the optimizers see); a plain float or
Param.init(float) stays a non-trainable Const. The model is otherwise an
ordinary brainstate.nn.Dynamics (see Creating Custom Models).
Two rules make a parameter gradient-friendly (learned the hard way across the fitting tutorials):
Make the trainable dimensionless. A
mV-valuedParamcrashes the best-parameter snapshot insideFitter(jnp.asarrayrefuses a unit-carrying value). Keep the knob a plain scalar; let units live on the states.Fit a scalar summary, not a raw oscillatory trace. Point-by-point time-series RMSE of a limit cycle is phase-degenerate and the gradient collapses. A steady state, an amplitude, an FC value, or a spectral peak is well-conditioned.
Here is a one-population leaky-rate model whose input gain g is trainable:
class GainPopulation(brainstate.nn.Dynamics):
"""Leaky firing-rate population with a trainable input gain ``g``.
dr/dt = (-r + g * tanh(input)) / tau
"""
def __init__(self, in_size, g=1.0, tau=10. * u.ms):
super().__init__(in_size)
self.tau = tau
# fit=True -> a trainable ParamState; a dimensionless scalar knob.
self.g = Param(g, fit=True)
def init_state(self, batch_size=None):
self.r = brainstate.HiddenState(
braintools.init.param(braintools.init.Constant(0.0),
self.varshape, batch_size)
)
def update(self, inp=0.0):
r = self.r.value
dr = (-r + self.g.value() * jnp.tanh(inp)) / self.tau
self.r.value = r + dr * brainstate.environ.get_dt()
return self.r.value
model = GainPopulation(1, g=0.5)
brainstate.nn.init_all_states(model)
# The trainable leaves the optimizers will see:
list(model.states(brainstate.ParamState).keys())
[('g', 'val')]
states(ParamState) returns the trainable leaves keyed by tuple paths
(('g', 'val')). Keep this in mind: a raw brainstate.transform.grad returns
gradients keyed by exactly these tuples, whereas FitResult.best_params uses the
dotted form ('g', or 'node.g' for a nested model). Same parameter, two
key conventions.
2. A loss as a composable objective#
An objective is a builder that returns a small callable(prediction, target) -> scalar, jit/grad/vmap-safe and unit-aware. This is exactly the shape of the
built-ins in brainmass.objectives, so a custom loss drops into the same slots.
The convention: strip units with brainunit.get_magnitude only where the metric
is scale-invariant; keep them on a difference you want unit-checked. See
Creating an Objective for the full contract.
Here the target behaviour is a steady-state mean rate, a clean scalar summary:
def steadystate_loss(n_tail=50):
"""Squared error between the settled mean rate and a scalar target."""
def loss(prediction, target):
amp = jnp.mean(u.get_magnitude(prediction[-n_tail:]))
return (amp - target) ** 2
return loss
def predict(m):
"""Run the model and return its rate trajectory (the prediction)."""
sim = brainmass.Simulator(m, dt=0.1 * u.ms)
res = sim.run(60. * u.ms, inputs=lambda i, t: 1.0, monitors=['r'])
return res['r']
# Ground truth: the trajectory of the model at g* = 2.0.
truth = GainPopulation(1, g=2.0)
target_amp = jnp.mean(u.get_magnitude(predict(truth)[-50:]))
float(target_amp)
1.5184532403945923
3a. Fit with brainmass.Fitter#
Fitter is the one-call path. You hand it the model, an optimizer, and either a
loss_fn(model) -> (scalar, aux) or an objective + predict pair (as here).
It registers the trainable weights, builds the jitted gradient step, tracks the
best-seen point, and returns a FitResult. The 'grad' backend reproduces the
canonical hand-rolled loop exactly – which we verify next.
model = GainPopulation(1, g=0.5)
fitter = brainmass.Fitter(
model,
braintools.optim.Adam(lr=0.1),
objective=steadystate_loss(),
predict=predict,
)
result = fitter.fit(target=target_amp, n_steps=60)
print(result)
print('recovered g =', {k: round(float(v), 4) for k, v in result.best_params.items()})
print('best loss =', float(result.best_loss))
FitResult(backend='grad', best_loss=1.66887e-05, n_steps=60, params=[g])
recovered g = {'g': 1.9878}
best loss = 1.6688674804754555e-05
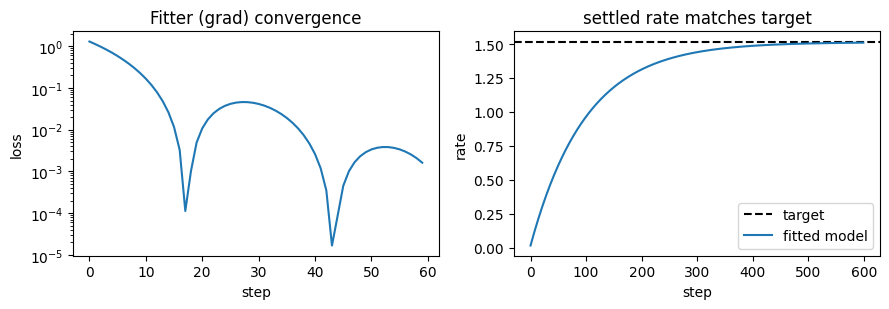
fig, ax = plt.subplots(1, 2, figsize=(9, 3.2))
ax[0].plot(result.history)
ax[0].set(xlabel='step', ylabel='loss', title='Fitter (grad) convergence')
ax[0].set_yscale('log')
ax[1].axhline(float(target_amp), ls='--', c='k', label='target')
ax[1].plot(u.get_magnitude(predict(model)), label='fitted model')
ax[1].set(xlabel='step', ylabel='rate', title='settled rate matches target')
ax[1].legend()
fig.tight_layout()
3b. The same fit, hand-written#
Fitter’s 'grad' backend is this loop. Writing it out is worth doing once,
because the moment you need something Fitter does not expose – minibatches, an
epoch loop, a held-out metric – you drop down to exactly this and add your own
control flow. The five lines that matter:
weights = model.states(brainstate.ParamState)– the trainable leaves.optimizer.register_trainable_weights(weights).a loss closure run inside
model.param_precompute()(applies transforms / precompute), addingmodel.reg_loss().brainstate.transform.grad(loss, weights, return_value=True).optimizer.step(grads)– all wrapped inbrainstate.transform.jit.
model2 = GainPopulation(1, g=0.5)
weights = model2.states(brainstate.ParamState)
optimizer = braintools.optim.Adam(lr=0.1)
optimizer.register_trainable_weights(weights)
def loss_closure():
with model2.param_precompute():
loss = steadystate_loss()(predict(model2), target_amp)
return loss + model2.reg_loss()
@brainstate.transform.jit
def train_step():
grad_fn = brainstate.transform.grad(loss_closure, weights, return_value=True)
grads, loss = grad_fn()
optimizer.step(grads)
return loss
history = [float(train_step()) for _ in range(60)]
print('hand-rolled g =', round(float(model2.g.value()), 4))
print('final loss =', history[-1])
# Same key gotcha: a standalone grad is keyed by the ParamState tuple, not 'g'.
grad_fn = brainstate.transform.grad(loss_closure, weights, return_value=True)
grads, _ = grad_fn()
print('raw grad keys =', list(grads.keys()))
hand-rolled g = 1.9546
final loss = 0.0016139140352606773
raw grad keys = [('g', 'val')]
Both paths converge to the same g ~ 2.0. The hand-rolled loop is the template a
task-shaped trainer extends – see the final section, Where this is going.
4. Batch the search with vmap#
To evaluate the loss across many parameter values at once, vmap over
parameters – build a fresh model inside the mapped function and map over the
scalar. This is the supported batching axis. (Batching states through
init_all_states(batch_size=...) is the right tool for an ensemble of one model,
but a delay-coupled network’s prefetch does not vectorise that way – vmap over
parameters instead.)
def loss_at(g_value):
m = GainPopulation(1, g=g_value)
return steadystate_loss()(predict(m), target_amp)
grid = jnp.linspace(0.5, 3.5, 25)
losses = jax.vmap(loss_at)(grid) # all 25 evaluated in one compiled call
best = grid[jnp.argmin(losses)]
print('vmap grid minimum at g =', round(float(best), 3))
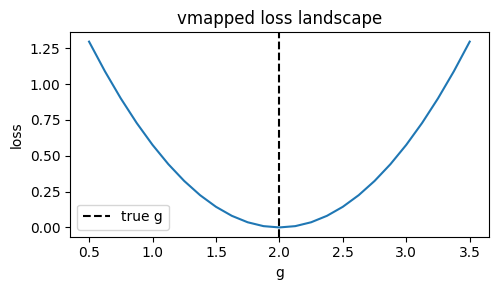
plt.figure(figsize=(5, 3))
plt.plot(grid, losses)
plt.axvline(2.0, ls='--', c='k', label='true g')
plt.xlabel('g'); plt.ylabel('loss'); plt.title('vmapped loss landscape')
plt.legend(); plt.tight_layout()
vmap grid minimum at g = 2.0
Where this is going#
Everything above is the stable, public contract:
Piece |
API |
|---|---|
trainable parameter |
|
loss |
|
one-call fit |
|
custom loop |
|
batched search |
|
Fitter fits one fixed target – a single predict(model) -> prediction
compared against one target. Task training (minibatched (inputs, targets), an
epoch loop, a held-out metric) is not something Fitter exposes; you reach for
the hand-written loop in section 3b and add the batching yourself.
That gap is named and given a home – but deliberately not built yet – as the
deferred Trainer in the Data-Driven Modeling Roadmap. A future goal will build
the Trainer (and model-discovery tooling) against this exact contract: it wraps
the section-3b loop plus batched state initialisation, and registers its datasets
through brainmass.datasets. Authoring a custom model, objective, and loop the way
this guide does is precisely what makes it slot in without restructuring.
See Also#
Creating Custom Models – the model contract this builds on.
Creating an Objective – the objective contract in depth.
Data-Driven Modeling – the data-driven pillar and its roadmap.
Fitting with Gradients – a worked end-to-end fit.