Generic 2D Oscillator#
The Generic 2D Oscillator is The Virtual Brain’s flexible planar node: a two-variable system \((V, W)\) whose nullclines are configurable polynomials, so that a single class can be tuned into an excitable, bistable, or oscillatory regime:
Choosing the polynomial coefficients \(a..g\) reproduces FitzHugh-Nagumo-like, bistable, or Morris-Lecar-like dynamics, which is why it is the default workhorse node in many whole-brain studies.
Reference: Sanz-Leon, Knock, Spiegler & Jirsa (2015), Mathematical framework for large-scale brain network modeling in The Virtual Brain, NeuroImage 111:385-430.
Build the model#
We use an oscillatory configuration and drive it with a constant input to elicit a limit cycle.
node = brainmass.Generic2dOscillatorStep(in_size=1, a=-0.5, b=-10.0, c=0.0,
d=0.1, I=0.0)
node
Generic2dOscillatorStep(
in_size=(1,),
out_size=(1,),
a=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(-0.5, dtype=float32)
),
b=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(-10., dtype=float32)
),
c=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(0., dtype=float32)
),
d=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(0.1, dtype=float32)
),
e=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(3., dtype=float32)
),
f=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(1., dtype=float32)
),
g=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(0., dtype=float32)
),
alpha=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(1., dtype=float32)
),
beta=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(1., dtype=float32)
),
gamma=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(1., dtype=float32)
),
I=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(0., dtype=float32)
),
tau=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(1., dtype=float32)
),
init_V=Constant(value=0.0),
init_W=Constant(value=0.0),
method=exp_euler
)
Run a simulation#
sim = brainmass.Simulator(node, dt=0.1 * u.ms)
res = sim.run(300. * u.ms, inputs=lambda i, t: 0.5,
monitors=['V', 'W'], transient=50. * u.ms)
res['V'].shape
(2500, 1)
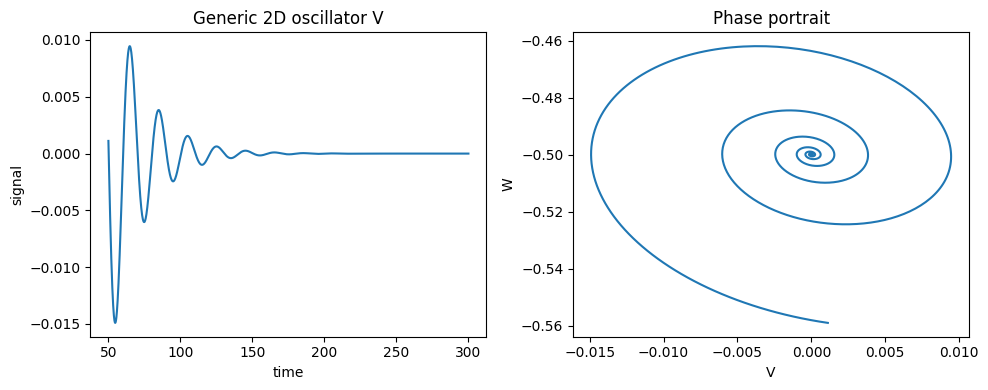
Visualize#
fig, axes = plt.subplots(1, 2, figsize=(10, 4))
brainmass.viz.plot_timeseries(res['V'], ts=res['ts'], ax=axes[0])
axes[0].set_title('Generic 2D oscillator V')
brainmass.viz.plot_phase_portrait(res['V'], res['W'], ax=axes[1])
axes[1].set_xlabel('V'); axes[1].set_ylabel('W')
axes[1].set_title('Phase portrait')
plt.tight_layout()
plt.show()
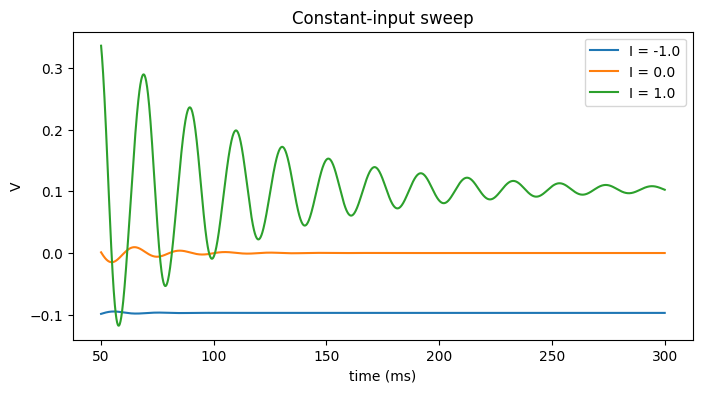
Try it: vary the constant input I#
The constant drive I shifts the V-nullcline and moves the node between regimes. We sweep it and watch the response amplitude.
fig, ax = plt.subplots(figsize=(8, 4))
for I in [-1.0, 0.0, 1.0]:
m = brainmass.Generic2dOscillatorStep(in_size=1, a=-0.5, b=-10.0, c=0.0, d=0.1, I=I)
r = brainmass.Simulator(m, dt=0.1 * u.ms).run(
300. * u.ms, inputs=lambda i, t: 0.5, monitors=['V'], transient=50. * u.ms)
ax.plot(u.get_magnitude(r['ts']), u.get_magnitude(r['V'])[:, 0], label=f'I = {I}')
ax.set_xlabel('time (ms)'); ax.set_ylabel('V'); ax.legend()
ax.set_title('Constant-input sweep')
plt.show()