Quickstart#
This is the 10-minute tour of brainmass. By the end you will have, using only the
high-level API:
picked a model and run it through the
Simulator,plotted the result with
brainmass.viz,added noise in a single line,
wired two regions into a delay-coupled
Networkfrom a bundled connectome, andfit a parameter by gradient descent with the
Fitteragainst a bundled signal.
No hand-written integration loops — the Simulator/Network/Fitter objects own the
brainstate.transform machinery so you focus on the model.
Note
The integration time step dt is a unit-aware quantity (0.1 * u.ms), passed to the
Simulator — it is not a model argument. Quantities flow through brainmass via
brainunit, so u.ms, u.mm, … keep your
numbers physically meaningful.
import brainmass
import braintools
import brainstate
import brainunit as u
import jax.numpy as jnp
import numpy as np
from brainstate.nn import Param
# `dt` is a global, set once through the environment. The Simulator also takes an
# explicit dt= below; setting it here lets delay-buffer sizing work when we build a
# Network (its conduction delays are measured in dt-steps at construction time).
brainstate.environ.set(dt=0.1 * u.ms)
brainmass.__version__
An NVIDIA GPU may be present on this machine, but a CUDA-enabled jaxlib is not installed. Falling back to cpu.
'0.0.6'
1. Pick a model and run it#
A brainmass model is a *Step object — one update step of a neural-mass equation, sized
for in_size regions. We pick the HopfStep oscillator in its
limit-cycle regime (a > 0) and hand it to a Simulator. One
.run(duration, monitors=...) call sets dt, initialises the state, steps the model,
and returns the stacked trajectories as a plain dict (plus a 'ts' time axis).
node = brainmass.HopfStep(in_size=1, a=0.25, w=0.3)
sim = brainmass.Simulator(node, dt=0.1 * u.ms)
res = sim.run(200.0 * u.ms, monitors=["x", "y"], transient=20.0 * u.ms)
print("recorded keys:", list(res))
print("x trajectory shape (steps, regions):", res["x"].shape)
print("time axis:", res["ts"][:3], "...", res["ts"][-1])
recorded keys: ['x', 'y', 'ts']
x trajectory shape (steps, regions): (1800, 1)
time axis: [20.1 20.2 20.3] ms ... 200. ms
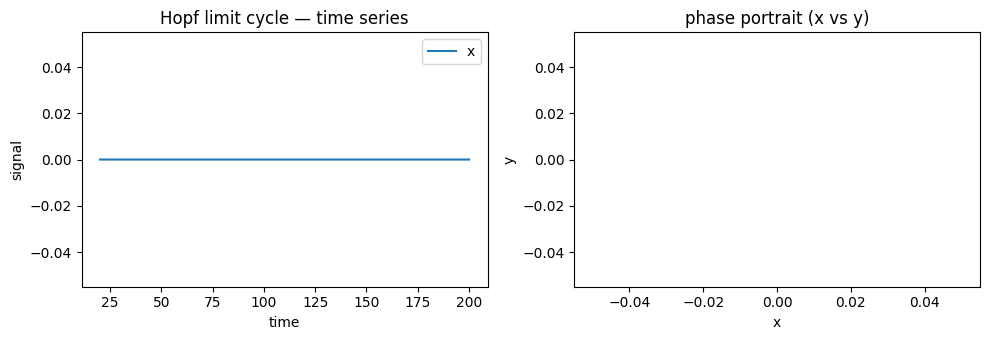
2. Plot it with brainmass.viz#
brainmass.viz collects thin, matplotlib-based helpers (install the [viz] extra).
plot_timeseries() takes the trajectory and the time axis directly;
plot_phase_portrait() plots one state variable against another, which
for a Hopf node traces out its circular limit cycle.
import matplotlib.pyplot as plt
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(10, 3.5))
brainmass.viz.plot_timeseries(res["x"], ts=res["ts"], labels=["x"], ax=ax1)
ax1.set_title("Hopf limit cycle — time series")
brainmass.viz.plot_phase_portrait(res["x"][:, 0], res["y"][:, 0], ax=ax2)
ax2.set_title("phase portrait (x vs y)")
fig.tight_layout()
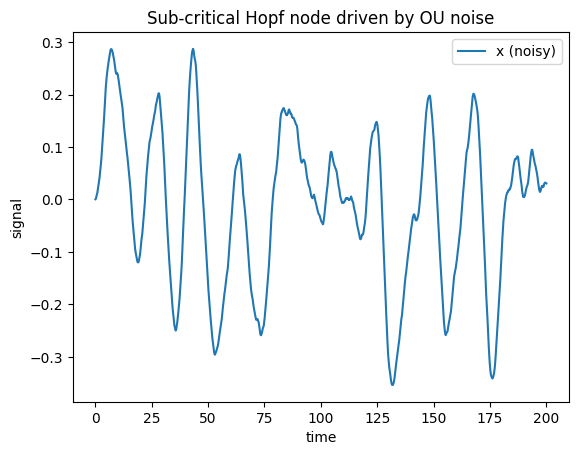
3. Add noise in one line#
Real activity fluctuates. Attach an Ornstein–Uhlenbeck process
(OUProcess) to a state component when you build the model — the noise
is added automatically inside update(), and the Simulator call is unchanged. Here we
drop the node below the bifurcation (a < 0, a stable focus) so the dynamics are noise
driven rather than a clean limit cycle.
noisy = brainmass.HopfStep(
in_size=1, a=-0.05, w=0.3,
noise_x=brainmass.OUProcess(in_size=1, sigma=0.1, tau=20.0 * u.ms), # <- one line
)
res_noisy = brainmass.Simulator(noisy, dt=0.1 * u.ms).run(200.0 * u.ms, monitors=["x"])
ax = brainmass.viz.plot_timeseries(res_noisy["x"], ts=res_noisy["ts"], labels=["x (noisy)"])
ax.set_title("Sub-critical Hopf node driven by OU noise");
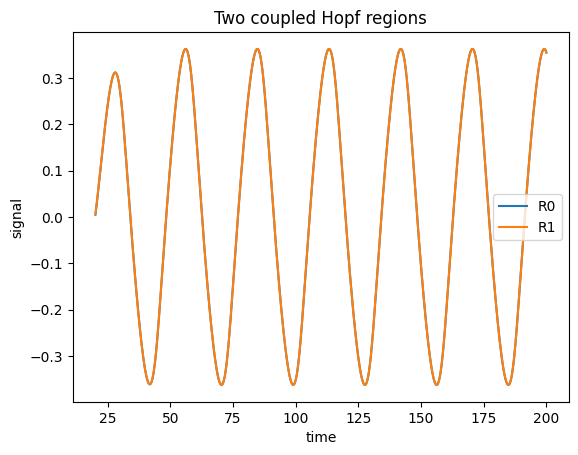
4. A two-region network (with a bundled connectome)#
brainmass.datasets ships small, license-clean example data so every notebook runs
with no download. load_dataset('example_connectome') returns a typed
Connectome with structural weights and unit-aware
distances (in u.mm).
We take the first two regions and hand them to a Network. The network
zeros the self-connections, turns distance / speed into conduction delays, and feeds
a diffusive coupling current back into the node — the same wiring you would otherwise write
by hand. The Simulator then drives the whole network exactly as it drove the single node.
conn = brainmass.datasets.load_dataset("example_connectome")
print("connectome:", conn.weights.shape, "regions:", list(conn.labels))
# Use the first two regions as a minimal 2-node network.
W = conn.weights[:2, :2]
D = conn.distances[:2, :2]
two_nodes = brainmass.HopfStep(in_size=2, a=0.2, w=0.3)
net = brainmass.Network(
two_nodes,
conn=W,
distance=D,
speed=10.0 * u.mm / u.ms, # delays = distance / speed
coupling="diffusive",
coupled_var="x",
k=0.5, # global coupling strength
)
res_net = brainmass.Simulator(net, dt=0.1 * u.ms).run(
200.0 * u.ms,
monitors=lambda m: m.node.x.value, # read the coupled node state each step
transient=20.0 * u.ms,
)
print("network output shape (steps, regions):", res_net["output"].shape)
ax = brainmass.viz.plot_timeseries(
res_net["output"], ts=res_net["ts"], labels=list(conn.labels[:2])
)
ax.set_title("Two coupled Hopf regions");
connectome: (8, 8) regions: [np.str_('R0'), np.str_('R1'), np.str_('R2'), np.str_('R3'), np.str_('R4'), np.str_('R5'), np.str_('R6'), np.str_('R7')]
network output shape (steps, regions): (1800, 2)
5. Fit a parameter by gradient descent#
Here is brainmass’s headline capability: because the whole simulation is differentiable, you can backprop through the ODE solve and fit parameters with gradients instead of grid or evolutionary search.
We use the bundled example_signal dataset as the target. A HopfStep
in its limit cycle settles at an amplitude ~sqrt(a / beta), so the bifurcation parameter
a controls how big the oscillation is. We mark a trainable with Param(..., fit=True),
start it too small, and let the Fitter (gradient backend) drive the
simulated oscillation’s amplitude to match the data.
# Target: the RMS amplitude of region 0 of the bundled example signal.
sig = brainmass.datasets.load_dataset("example_signal")
target0 = sig.signal[:, 0]
target_amp = jnp.asarray(float(np.sqrt(np.mean((target0 - target0.mean()) ** 2))))
print("target amplitude from example_signal:", round(float(target_amp), 4))
# Model with ONE trainable parameter: the Hopf bifurcation parameter `a`.
model = brainmass.HopfStep(
in_size=1,
a=Param(0.05, fit=True), # <- the single knob the Fitter will tune
w=0.3, beta=1.0,
init_x=braintools.init.Constant(0.5),
)
def loss_fn(m):
"""Run the model and compare its settled amplitude to the target."""
x = brainmass.Simulator(m, dt=0.1 * u.ms).run(
300.0 * u.ms, monitors=["x"], transient=150.0 * u.ms
)["x"][:, 0]
amp = jnp.sqrt(jnp.mean((x - jnp.mean(x)) ** 2))
return (amp - target_amp) ** 2, amp
fitter = brainmass.Fitter(model, braintools.optim.Adam(lr=0.05), loss_fn=loss_fn)
result = fitter.fit(n_steps=50)
print(result)
print(f"a: 0.05 -> {float(result.best_params['a']):.4f}")
print(f"loss: {result.history[0]:.4f} -> {result.best_loss:.5f}")
print(f"amplitude matched: {float(result.prediction):.4f} (target {float(target_amp):.4f})")
target amplitude from example_signal: 0.7152
FitResult(backend='grad', best_loss=3.10454e-07, n_steps=50, params=[a])
a: 0.05 -> 1.0262
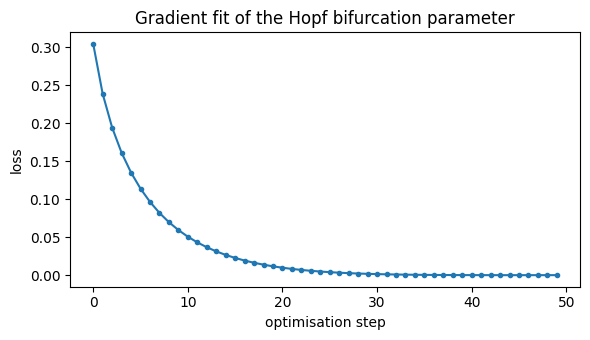
loss: 0.3042 -> 0.00000
amplitude matched: 0.7157 (target 0.7152)
The loss curve shows the gradient optimiser converging in a few dozen steps — no parameter sweep required.
fig, ax = plt.subplots(figsize=(6, 3.5))
ax.plot(result.history, marker=".")
ax.set_xlabel("optimisation step")
ax.set_ylabel("loss")
ax.set_title("Gradient fit of the Hopf bifurcation parameter")
fig.tight_layout()
Where to go next#
You have run, visualised, perturbed, coupled, and fit a model — all through the high-level API. To go deeper:
Key Concepts — the mental model behind
*Stepmodels,Simulator,Network,Fitterand units.The fitting story is expanded across tutorials 06 (gradients), 07 (gradient-free) and 08 (training on tasks).
Choose a Model — browse every model with
brainmass.list_models().Building a Network — full whole-brain networks.
See also#
Orchestration —
Simulator/Network/FitterAPI.Datasets and Visualization — the bundled data and plotting helpers.
Neural Mass Models — the full model reference.