Your First Simulation#
Welcome to brainmass. In this first tutorial you will run a single neural-mass model from start to finish using only the high-level API — no hand-written integration loops. By the end you will be able to:
construct a model and initialise its state,
run it for a chosen duration with the
Simulator,plot the result with
brainmass.viz, andchange one parameter and re-run to see the effect.
We will use the FitzHughNagumoStep model — a classic two-variable model
of an excitable unit. It sits quietly at rest until a stimulus pushes it past a threshold,
at which point it fires a single large excursion (a “spike”) before relaxing back. That makes
the effect of a parameter change easy to see.
Note
Every code cell on this page is executed when the notebook is authored, so the outputs you see are real. For the 10-minute tour of the whole library — networks, noise, and gradient-based fitting — see Quickstart.
Setup#
We import brainmass and a few companions. brainunit (u) gives us unit-aware
quantities: the time step dt and the run duration are physical times like 0.1 * u.ms,
not bare numbers. We set a global dt once through the environment; the Simulator also
takes it explicitly below.
import brainmass
import brainstate
import brainunit as u
import jax.numpy as jnp
import matplotlib.pyplot as plt
brainstate.environ.set(dt=0.1 * u.ms)
brainmass.__version__
An NVIDIA GPU may be present on this machine, but a CUDA-enabled jaxlib is not installed. Falling back to cpu.
'0.0.6'
1. Construct a model#
A brainmass model is a *Step object — one update step of a neural-mass equation, sized for
in_size regions. Here we build a single FitzHugh–Nagumo unit (in_size=1). It carries
two state variables: a fast activator V (membrane-potential–like) and a slow recovery
variable w.
node = brainmass.FitzHughNagumoStep(in_size=1)
node
FitzHughNagumoStep(
in_size=(1,),
out_size=(1,),
alpha=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(3., dtype=float32)
),
beta=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(4., dtype=float32)
),
gamma=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(-1.5, dtype=float32)
),
delta=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(0., dtype=float32)
),
epsilon=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Array(0.5, dtype=float32)
),
tau=Const(
fit=False,
t=IdentityT(),
reg=None,
val=Quantity(20., "ms")
),
init_V=Uniform(low=0, high=0.05),
init_w=Uniform(low=0, high=0.05),
method=exp_euler
)
2. Run it with the Simulator#
The Simulator owns the whole run loop. A single .run(...) call:
sets
dtand initialises the model’s state (init_all_states),steps the model forward, and
returns the recorded trajectories as a plain dict.
How many steps is that? The number of integration steps is duration / dt. With
duration = 200 * u.ms and dt = 0.1 * u.ms that is 2000 steps.
We give the unit a brief external stimulus: a current pulse to V between 20 ms and
22 ms, via the inputs= callback (it receives the step index i and time t and returns
the drive for that step). We record both state variables by name with monitors=['V', 'w'].
def stimulus(i, t):
"""A brief supra-threshold current pulse to V between 20 and 22 ms."""
pulse = jnp.where((t > 20.0 * u.ms) & (t < 22.0 * u.ms), 1.5, 0.0)
return (pulse,)
sim = brainmass.Simulator(node, dt=0.1 * u.ms)
res = sim.run(200.0 * u.ms, inputs=stimulus, monitors=["V", "w"])
print("recorded keys:", list(res))
print("V trajectory shape (steps, regions):", res["V"].shape)
print("time axis runs from", res["ts"][0], "to", res["ts"][-1])
recorded keys: ['V', 'w', 'ts']
V trajectory shape (steps, regions): (2000, 1)
time axis runs from 0.1 ms to 200. ms
3. Plot the result#
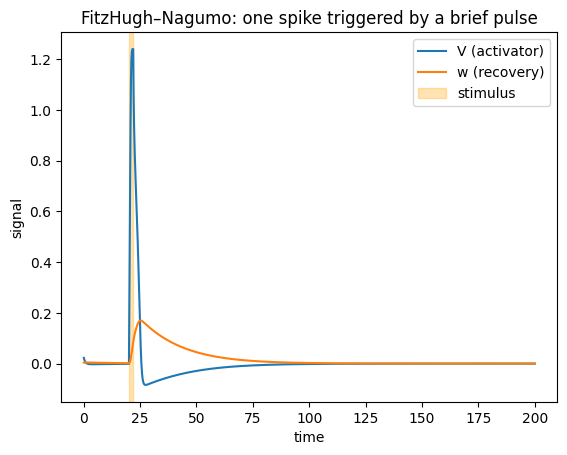
brainmass.viz.plot_timeseries() takes the trajectory and the time axis directly. The
single sub-threshold rest is interrupted by one clean spike right after the 20 ms pulse — the
hallmark of an excitable unit.
ax = brainmass.viz.plot_timeseries(
res["V"], ts=res["ts"], labels=["V (activator)"]
)
brainmass.viz.plot_timeseries(res["w"], ts=res["ts"], labels=["w (recovery)"], ax=ax)
ax.axvspan(20, 22, color="orange", alpha=0.3, label="stimulus")
ax.legend()
ax.set_title("FitzHugh–Nagumo: one spike triggered by a brief pulse");
A note on transients#
Models often start away from their natural operating point and need a few milliseconds to
settle. That initial transient is usually not interesting, so the Simulator can discard
it for you: pass transient=<duration> and the first stretch is dropped from the returned
arrays (the run itself is unchanged — only the output is trimmed).
res_full = sim.run(200.0 * u.ms, inputs=stimulus, monitors=["V"])
res_trim = sim.run(200.0 * u.ms, inputs=stimulus, monitors=["V"], transient=50.0 * u.ms)
print("without transient discard:", res_full["V"].shape[0], "recorded steps")
print("with 50 ms discarded: ", res_trim["V"].shape[0], "recorded steps")
print("first recorded time now starts at", res_trim["ts"][0])
without transient discard: 2000 recorded steps
with 50 ms discarded: 1500 recorded steps
first recorded time now starts at 50.1 ms
4. Change one parameter and see the effect#
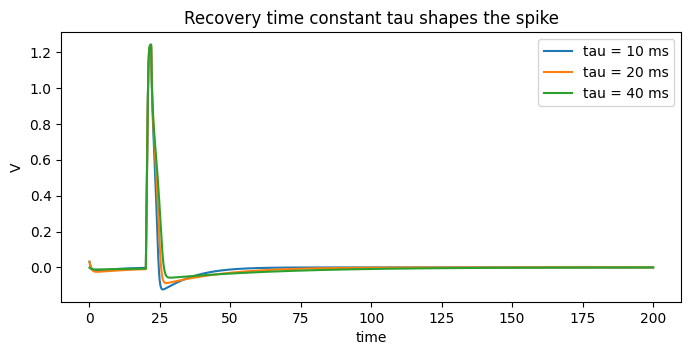
The point of a model is that its parameters control its behaviour. The recovery time
constant tau sets how quickly the slow variable w chases the activator. Make tau larger
and recovery is sluggish, so the spike is broader; make it smaller and the unit snaps back
faster.
We build the same model three times with different tau, run each, and overlay the
activator traces. Constructing-running-plotting is so concise that a parameter sweep is just
a loop over model builds.
fig, ax = plt.subplots(figsize=(8, 3.5))
for tau in [10.0, 20.0, 40.0]:
model = brainmass.FitzHughNagumoStep(in_size=1, tau=tau * u.ms)
r = brainmass.Simulator(model, dt=0.1 * u.ms).run(
200.0 * u.ms, inputs=stimulus, monitors=["V"]
)
brainmass.viz.plot_timeseries(
r["V"], ts=r["ts"], labels=[f"tau = {tau:.0f} ms"], ax=ax
)
ax.set_title("Recovery time constant tau shapes the spike")
ax.set_ylabel("V");
What you learned#
A model is a
*Stepobject sized forin_sizeregions.Simulator(model, dt=...).run(duration, monitors=...)initialises, steps, and collects trajectories —duration / dtgives the number of steps.monitors=[...]records named state variables;inputs=injects an external drive;transient=trims the warm-up from the output.brainmass.vizturns trajectories into plots in one line.Changing a parameter and re-running is the basic loop of model exploration.
Next steps#
Models and Dynamics — tour the model families and watch a parameter move a system across a bifurcation.
Noise and Stochastic Runs — add stochastic fluctuations.
Gallery — a runnable demo for every model in the library.