Training on Tasks#
Fitting tunes a handful of parameters to reproduce one observation. Training is the data-driven sibling: optimise all of a network’s weights, over many input/target pairs, for many epochs, so the network learns to perform a task. Because brainmass networks are differentiable, the same backpropagation that fit a single parameter in Fitting with Gradients scales to training a recurrent network.
In this tutorial we train a HORNSeqNetwork – a recurrent network of
harmonic oscillators – on the bundled delayed match-to-sample task. The network sees a cue,
then (after a delay) a probe, and must decide whether they match. You will:
load the task from
brainmass.datasets,build a HORN classifier and a cross-entropy task loss,
optimise its weights over epochs/mini-batches with a
braintools.optimoptimiser, andwatch the train/test accuracy climb from chance to near-perfect.
Note
Fitter targets parameter fitting against a single fixed target. Task
training – minibatching (inputs, targets) pairs over epochs, tracking a held-out metric –
is a different loop, so here we drive the braintools.optim optimiser directly. The
Lessons at the bottom note this as the gap that a future Trainer would close.
import brainmass
import brainstate
import braintools
import brainunit as u
import jax
import jax.numpy as jnp
import numpy as np
import matplotlib.pyplot as plt
brainstate.environ.set(dt=1.0 * u.ms)
brainstate.random.seed(0)
An NVIDIA GPU may be present on this machine, but a CUDA-enabled jaxlib is not installed. Falling back to cpu.
The task#
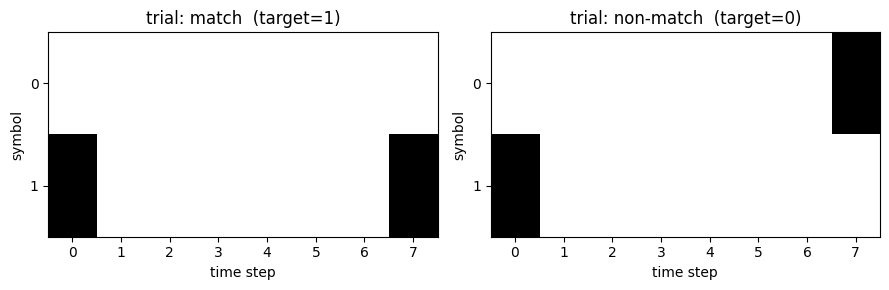
brainmass.datasets.delayed_match_task() synthesises a delayed match-to-sample dataset. At
each trial a one-hot cue symbol is presented at the first time step; after a delay of blank
steps a one-hot probe appears at the last step. The binary target is 1 if the probe
matches the cue and 0 otherwise – the network must hold the cue in its dynamics across the
delay and compare. We use a 2-symbol alphabet and an 8-step sequence.
inputs_np, targets_np = brainmass.datasets.delayed_match_task(
n_samples=320, seq_len=8, n_symbols=2, seed=0,
)
print("inputs :", inputs_np.shape, inputs_np.dtype, " (n_samples, seq_len, n_symbols)")
print("targets:", targets_np.shape, targets_np.dtype, " balance =", float(targets_np.mean()))
inputs = jnp.asarray(inputs_np, dtype=jnp.float32)
targets = jnp.asarray(targets_np, dtype=jnp.int32)
# Hold out a test split.
n_train = 256
X_train, y_train = inputs[:n_train], targets[:n_train]
X_test, y_test = inputs[n_train:], targets[n_train:]
n_symbols = inputs.shape[2]
# Visualise one matching and one non-matching trial.
fig, axes = plt.subplots(1, 2, figsize=(9, 3))
for ax, idx, name in [(axes[0], int(np.argmax(targets_np == 1)), 'match'),
(axes[1], int(np.argmax(targets_np == 0)), 'non-match')]:
ax.imshow(inputs_np[idx].T, aspect='auto', cmap='Greys', interpolation='nearest')
ax.set_title(f"trial: {name} (target={int(targets_np[idx])})")
ax.set_xlabel('time step'); ax.set_ylabel('symbol')
ax.set_yticks(range(n_symbols))
plt.tight_layout()
plt.show()
inputs : (320, 8, 2) float64 (n_samples, seq_len, n_symbols)
targets: (320,) int64 balance = 0.5
The network#
A HORNSeqNetwork maps an input sequence (T, n_input) to a single output
vector by running its oscillator dynamics across the sequence and reading out the final state.
We give it two output units (match / non-match logits). The alpha (excitability) is raised
from its default so the oscillators respond strongly enough to learn this task quickly.
The network writes its hidden states in place during the forward pass, and
init_state() allocates them at the unbatched shape. To process a
mini-batch we reset the hidden states to the batch shape before each forward pass and feed the
sequence as (T, batch, n_input).
net = brainmass.HORNSeqNetwork(
n_input=n_symbols,
n_hidden=64,
n_output=2,
alpha=0.2, # excitability (raised from the 0.04 default)
omega=2 * np.pi / 28,
)
brainstate.nn.init_all_states(net)
def reset_hidden(batch_size):
# HORN allocates hidden states unbatched; broadcast them to the batch shape.
for layer in net.layers:
shape = (batch_size,) + tuple(layer.horn.in_size)
layer.horn.x.value = jnp.zeros(shape)
layer.horn.y.value = jnp.zeros(shape)
def logits(batch_inputs): # batch_inputs: (B, T, n_symbols) -> (B, 2)
reset_hidden(batch_inputs.shape[0])
seq = jnp.transpose(batch_inputs, (1, 0, 2)) # (T, B, n_symbols): time leads
return net(seq)
# A trainable weight = a ParamState. HORN's Linear layers expose several.
weights = net.states(brainstate.ParamState)
print("trainable weight tensors:", len(weights))
trainable weight tensors: 3
The task loss and training loop#
The loss is softmax cross-entropy between the network’s logits and the binary target, with
accuracy tracked alongside. We register the trainable weights with an Adam optimiser and, each
step, take the gradient of the loss through the whole recurrent rollout
(brainstate.transform.grad()) and apply it (step()) – the
canonical brainmass training primitive, jitted for speed.
This is the same backprop-through-the-solve as the fitting tutorials; the only new ingredients are minibatching and the epoch loop.
optimizer = braintools.optim.Adam(lr=3e-2)
optimizer.register_trainable_weights(weights)
def loss_and_acc(batch_inputs, batch_targets):
lg = logits(batch_inputs)
logp = jax.nn.log_softmax(lg, axis=-1)
ce = -jnp.mean(logp[jnp.arange(batch_targets.shape[0]), batch_targets])
acc = jnp.mean(jnp.argmax(lg, axis=-1) == batch_targets)
return ce, acc
@brainstate.transform.jit
def train_step(batch_inputs, batch_targets):
grad_fn = brainstate.transform.grad(
lambda: loss_and_acc(batch_inputs, batch_targets),
weights, has_aux=True, return_value=True,
)
grads, loss, acc = grad_fn()
optimizer.step(grads)
return loss, acc
@brainstate.transform.jit
def evaluate(batch_inputs, batch_targets):
return loss_and_acc(batch_inputs, batch_targets)
n_epochs = 20
batch_size = 32
history = {'epoch': [], 'train_loss': [], 'train_acc': [], 'test_acc': []}
for epoch in range(n_epochs):
perm = np.random.RandomState(epoch).permutation(n_train)
losses, accs = [], []
for start in range(0, n_train, batch_size):
idx = perm[start:start + batch_size]
if len(idx) < batch_size:
continue
loss, acc = train_step(X_train[idx], y_train[idx])
losses.append(float(loss)); accs.append(float(acc))
_, test_acc = evaluate(X_test, y_test)
history['epoch'].append(epoch)
history['train_loss'].append(float(np.mean(losses)))
history['train_acc'].append(float(np.mean(accs)))
history['test_acc'].append(float(test_acc))
if epoch % 4 == 0 or epoch == n_epochs - 1:
print(f"epoch {epoch:2d}: train_loss={np.mean(losses):.4f} "
f"train_acc={np.mean(accs):.3f} test_acc={float(test_acc):.3f}")
epoch 0: train_loss=1.1386 train_acc=0.543 test_acc=0.516
epoch 4: train_loss=0.6885 train_acc=0.562 test_acc=0.516
epoch 8: train_loss=0.6811 train_acc=0.676 test_acc=0.750
epoch 12: train_loss=0.5739 train_acc=0.785 test_acc=1.000
epoch 16: train_loss=0.2497 train_acc=1.000 test_acc=1.000
epoch 19: train_loss=0.1423 train_acc=1.000 test_acc=1.000
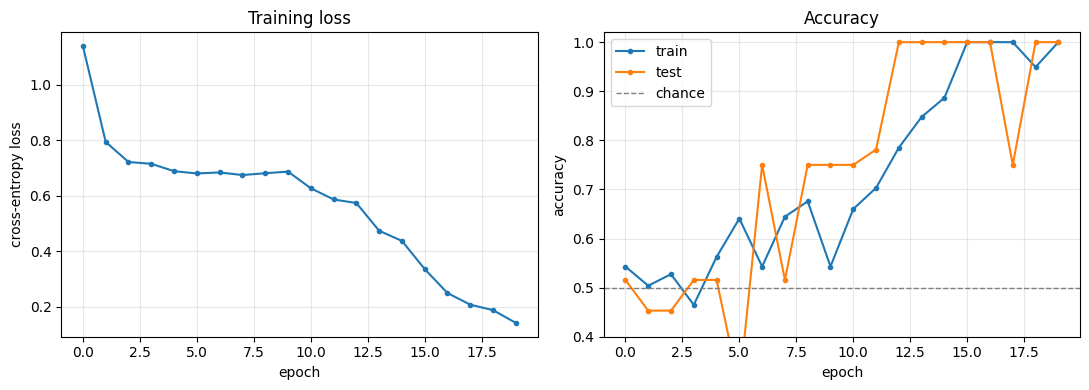
Results#
The network starts at chance (~50%, a binary task) and – as gradient descent shapes its recurrent weights to hold the cue across the delay – climbs to near-perfect accuracy on both the training and held-out sets.
final_train = history['train_acc'][-1]
final_test = history['test_acc'][-1]
print(f"final train accuracy: {final_train:.1%}")
print(f"final test accuracy: {final_test:.1%}")
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(11, 4))
ax1.plot(history['epoch'], history['train_loss'], marker='.')
ax1.set_xlabel('epoch'); ax1.set_ylabel('cross-entropy loss')
ax1.set_title('Training loss'); ax1.grid(alpha=0.3)
ax2.plot(history['epoch'], history['train_acc'], marker='.', label='train')
ax2.plot(history['epoch'], history['test_acc'], marker='.', label='test')
ax2.axhline(0.5, color='grey', ls='--', lw=1, label='chance')
ax2.set_xlabel('epoch'); ax2.set_ylabel('accuracy')
ax2.set_ylim(0.4, 1.02); ax2.set_title('Accuracy'); ax2.legend(); ax2.grid(alpha=0.3)
plt.tight_layout()
plt.show()
final train accuracy: 100.0%
final test accuracy: 100.0%
Lessons: the Trainer gap#
This notebook used braintools.optim directly because Fitter does not
yet cover task training:
Fitterfits parameters against a single fixed target via onepredict(model) -> scalarcall. Task training needs minibatched(inputs, targets)pairs, an epoch loop, and a held-out metric – none of whichFitterexposes.We also had to reset the network’s hidden states to the batch shape by hand (
reset_hidden), becauseHORNSeqNetworkallocates them unbatched. A training abstraction would own batched state initialisation.
A future Trainer – the data-driven counterpart to Fitter – would wrap exactly the loop
written above: dataset minibatching, the jitted grad -> optimizer.step, per-epoch
train/validation metrics, and batched state handling. Until then, the loop in this notebook is
the recommended pattern for training a brainmass network on a task. (See
Data-Driven Modeling for the data-driven roadmap.)
Summary#
Training optimises a whole network’s weights over many
(input, target)pairs and epochs, using the same backprop-through-the-solve as fitting.A
HORNSeqNetworklearns the delayed match-to-sample task frombrainmass.datasetsto near-perfect accuracy in ~20 epochs.braintools.optimprovides the optimiser; thegrad -> steploop is jitted for speed.A dedicated
Traineris the natural next abstraction; for now, drive the optimiser directly.
Next steps#
Fitting with Gradients – the gradient machinery behind training.
Data-Driven Modeling – the data-driven narrative and roadmap.
HORN Models –
HORNSeqNetworkAPI.